pcfitsphere
Fit sphere to 3-D point cloud
Syntax
Description
model = pcfitsphere(ptCloudIn,maxDistance)
This function uses the M-estimator SAmple Consensus (MSAC) algorithm to find the sphere. The MSAC algorithm is a variant of the RANdom SAmple Consensus (RANSAC) algorithm.
[ additionally returns linear indices to the inlier and
outlier points in the point cloud input.model,inlierIndices,outlierIndices]
= pcfitsphere(___)
[ additionally returns the mean error of the distance of
inlier points to the model, using any of the preceding syntaxes.model,inlierIndices,outlierIndices,meanError] =
pcfitsphere(___)
[___] = pcfitsphere(___,
specifies options using one or more name-value arguments in addition to any
combination of arguments from previous syntaxes. For example,
Name=Value)MaxNumTrials=1000 sets the maximum number of random
trials to 1000.
Examples
Load a point cloud into the workspace.
load("object3d.mat");Display the point cloud and label the figure.
figure
pcshow(ptCloud)
title("Detect a sphere in a point cloud")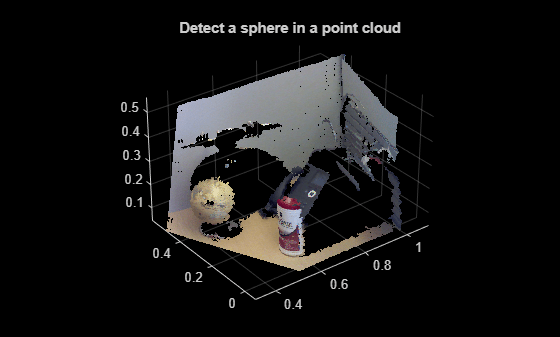
Set the maximum point-to-sphere distance for sphere fitting to 1cm.
maxDistance = 0.01;
Set the region of interest to constrain the search.
roi = [-inf,0.5;0.2,0.4;0.1,inf]; sampleIndices = findPointsInROI(ptCloud,roi);
Detect the globe in the point cloud and extract it.
[model,inlierIndices] = pcfitsphere(ptCloud,maxDistance,SampleIndices=sampleIndices); globe = select(ptCloud,inlierIndices);
Plot the extracted globe.
figure
pcshow(globe)
title("Globe Point Cloud")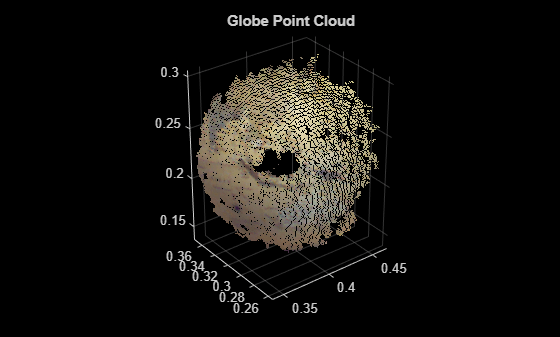
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Torr, P. H. S. and A. Zisserman. “MLESAC: A New Robust Estimator with Application to Estimating Image Geometry.” Computer Vision and Image Understanding. 2000.
Extended Capabilities
Version History
Introduced in R2015b
See Also
Objects
Functions
pcfitplane|pcfitcylinder|findPointsInROI|pcshow|pcwrite|pcread|pcmerge|pctransform|pcregistericp|pcdenoise