Optical Flow
Estimate object velocities
Libraries:
Computer Vision Toolbox /
Analysis & Enhancement
Description
The Optical Flow block estimates the direction and speed of object motion between two images or between one video frame to another frame using either the Horn-Schunck or the Lucas-Kanade method.
Examples
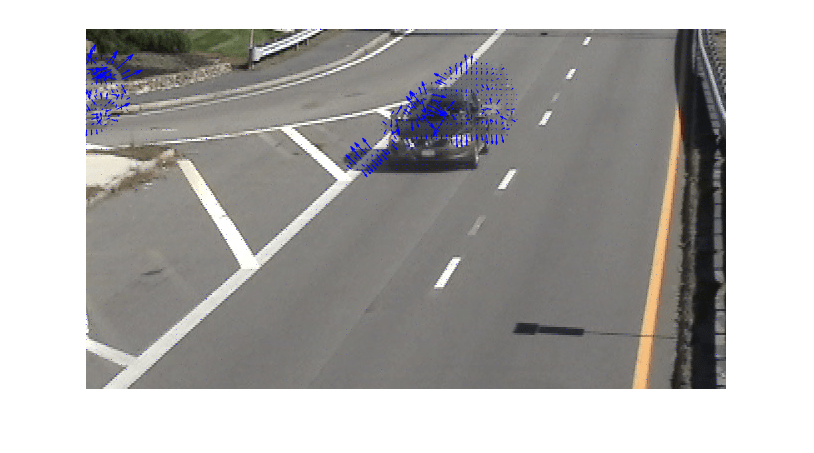
Compute Optical Flow Velocities
Compute the optical flow velocities for a moving object in a video or image sequence.
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Algorithms
If you set the temporal gradient filter to Derivative of
Gaussian, u and v are solved using
these steps.
Compute and .
Use a Gaussian filter to perform temporal filtering. Specify the temporal filter characteristics, such as the standard deviation and number of filter coefficients, by using the Number of frames to buffer for temporal smoothing parameter.
Use a Gaussian filter and the derivative of a Gaussian filter to smooth the image by using spatial filtering. Specify the standard deviation and length of the image smoothing filter by using the Standard deviation for image smoothing filter parameter.
Compute between images 1 and 2.
Use the derivative of a Gaussian filter to perform temporal filtering. Specify the temporal filter characteristics, such as the standard deviation and number of filter coefficients, by using the Number of frames to buffer for temporal smoothing parameter.
Use the filter described in step 1b to perform spatial filtering on the output of the temporal filter.
Smooth the gradient components, , , and , by using a gradient smoothing filter. Use the Standard deviation for gradient smoothing filter parameter to specify the standard deviation and the number of filter coefficients for the gradient smoothing filter.
Solve the 2-by-2 linear equations for each pixel using this method:
If
then the eigenvalues of A are
When the block finds the eigenvalues, it compares them to the threshold, , that corresponds to the value you enter for the Threshold for noise reduction parameter. The results fall into one of the following cases.
Case 1: and
A is nonsingular, so the block solves the system of equations by using Cramer's rule.
Case 2: and
A is singular (noninvertible), so the block normalizes the gradient flow to calculate u and v.
Case 3: and
the optical flow, u and v, is 0.

Extended Capabilities
Version History
Introduced before R2006a