Tuk tuk
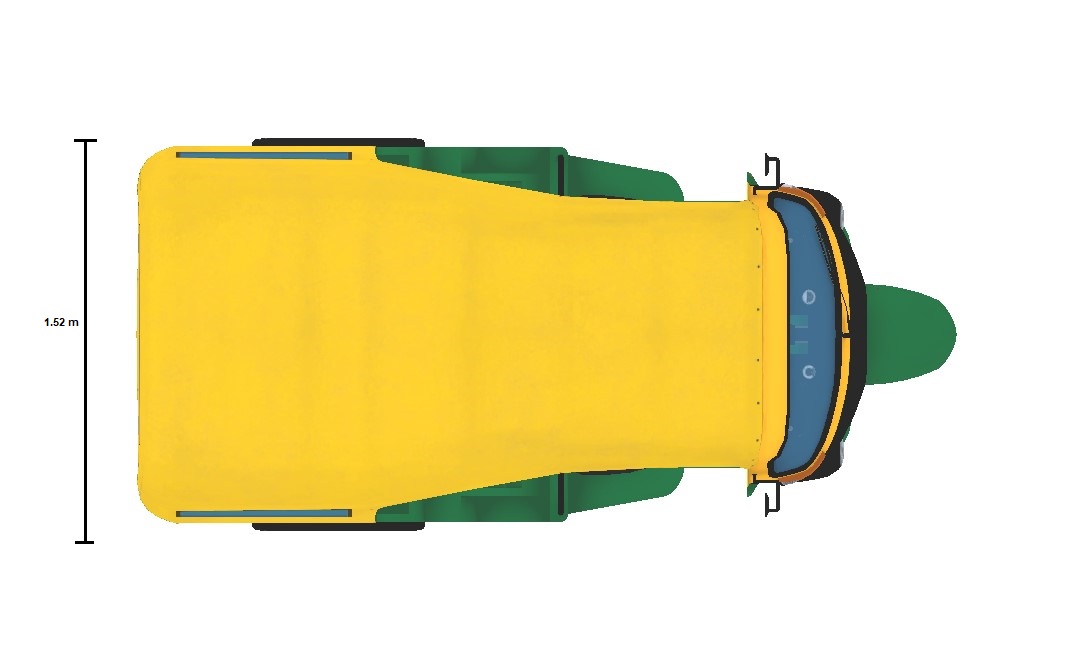
Tuk tuk vehicle dimensions
Description
Tuk tuk is one of the vehicles that you can use within the 3D simulation environment. This environment is rendered using the Unreal Engine® from Epic Games®. The Dimensions section provides the dimensions of this vehicle. The height dimensions are with respect to the vertical ground plane. The length and width dimensions are with respect to the origin of the vehicle in the vehicle coordinate system. The origin is on the ground, at the geometric center of the vehicle.
To add this type of vehicle to the 3D simulation environment:
Add a Simulation 3D Three-Wheeled Vehicle block to your Simulink® model.
In the block, set the Type parameter to
Tuk tuk.
Dimensions


Sensor Mounting Locations
In the 3D simulation sensor blocks, use the Mounting location parameter to mount sensors at predefined locations on the vehicle. The table shows the X, Y, Z, Roll, Pitch, and Yaw positions of the mounting locations relative to the vehicle origin. These locations are in the vehicle coordinate system, where:
The X-axis points forward from the vehicle.
The Y-axis points to the left of the vehicle, as viewed when facing forward.
The Z-axis points up from the ground.
Tuk tuk — Sensor Locations Relative to Vehicle Origin
| Mounting Location | X (m) | Y (m) | Z (m) | Roll (radian) | Pitch (radian) | Yaw (radian) |
|---|---|---|---|---|---|---|
Front center | 1 | 0 | 0.90 | 0 | 0 | 0 |
Rear center | –1.90 | 0 | 0.60 | 0 | 0 | pi |
| 0.57 | 0.60 | 1.45 | 0 | - pi/2 | 0 |
| 0.57 | - 0.60 | 1.45 | 0 | - pi/2 | 0 |