Transmit and Receive Data Using PX4 CAN Blocks
This example shows to use UAV Toolbox Support Package for PX4® Autopilots to transmit and receive data from the CAN network using the specified CAN device.
Introduction
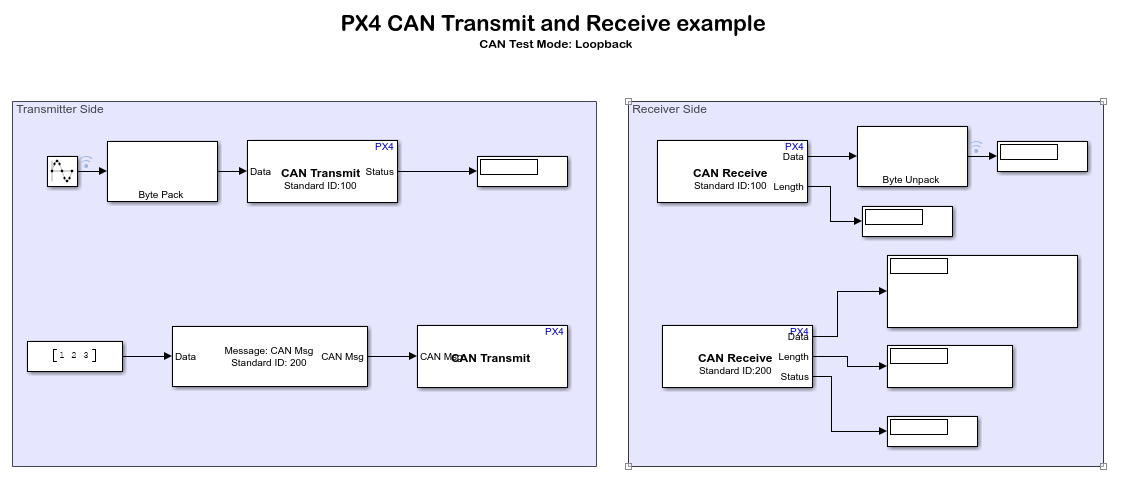
In this example, the Transmitter side of the model uses PX4 CAN Transmit blocks to transmit data. The Receiver side of the model uses PX4 CAN Receive blocks to receive data.
Prerequisites
If you are new to Simulink®, watch the Simulink Quick Start video.
Required Hardware
To run this example, you will need the following hardware:
Supported PX4 Autopilot
Configure Model, Transmit Data, and Receive Data
In this example, Sine wave of data type double is sent as a CAN message. Byte Pack block is used to convert signals of data types to a uint8 vector output. Message ID:100 is transmitted to CAN Transmit block in the Transmitter Side of the model. In the Receiver side of the model, Message ID:100 is received by the CAN Receive block. The Byte Unpack block is used to convert a vector of uint8 data type to signals of data types double.
Similarly, a constant value is sent as a CAN message. Message ID:200 is transmitted to CAN Transmit block in the Transmitter Side of the model and in the Receiver side of the model, Message ID:200 is received by the CAN Receive block.
Note: To avoid conflict with PX4 UAVCAN, disable UAVCAN before working with PX4 CAN blocks. To disable, set the PX4 parameter UAVCAN_ENABLE to 0. For more information, see Finding/Updating Parameters.
Perform these steps to configure the model, transmit data, and receive data.
1. Open MATLAB®.
2. Open the example px4demo_CAN model.
3. Configure the model.
Note: Steps to configure the model is not required in the pre-configured model. Perform these steps if you have changed the hardware or not using the pre-configured model.
Go to Modeling > Model Settings to open the Configuration Parameters dialog box.
Click Hardware Implementation and select the required PX4 hardware from the list in Hardware board parameter.
Expand Target hardware resources for that board.
Go to CAN tab.
Set the Baud rate to
500000.Set the Test mode to
Loopback. This enables loopback testing of CAN messages and allows you to send and receive CAN messages without connecting to the hardware.CAN port is set to
CAN1. OnlyCAN1is supported for CAN port.

4. Click Monitor & Tune from Run on Hardware section of Hardware tab in the Simulink Toolstrip. Wait for the Simulation to start. The Display block displays the data being received in the target hardware.
Try this Example with STM32H7 based PX4 Autopilots
If you are using a PX4 Autopilot that is based on the STM32H7 processor (such as Cube Orange, Cube Orange+, Pixhawk 6x, and Pixhawk 6c), it is essential to connect a CAN Node to the CAN bus and ensure that it is powered on. Without an external CAN node, both CAN Transmit and Receive operations will fail, even when in Loopback mode.

Other Things to Try
In this example, the identifier types used are Standard ID for both transmit and receive communications. Try using this example with Extended ID as the identifier type for one communication.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)