PMSM Position Control
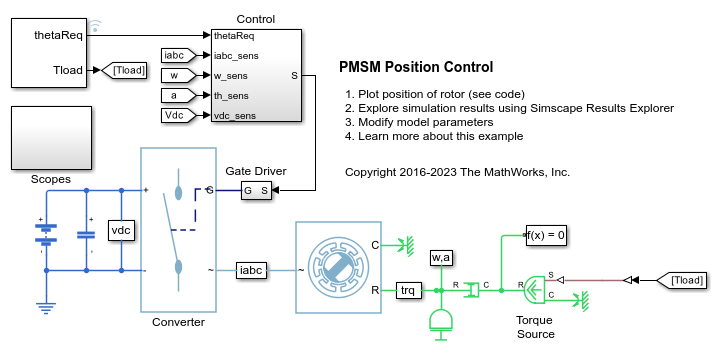
This example shows how to control the rotor position in a PMSM based electrical drive. An ideal torque source provides the load. The Control subsystem uses a cascade control structure with two control loops, an outer loop for position and speed control, and an inner loop for current control. The states for the estimator design are the electromagnetic torque, the mechanical angular velocity, the mechanical angular position, and the disturbance (load torque). An optimal state-feedback linear quadratic regulator controls the position and speed. A Luenberger observer estimates the load. PI controllers implement the inner current-control loop. A controlled three-phase inverter feeds the PMSM. The simulation uses step references. The Scopes subsystem contains scopes that allow you to see the simulation results.
Model
Simulation Results from Simscape Logging
The plot below shows the requested and measured angle for the test and the rotor speed in the electric drive.

References
[1] S. Carpiuc and C. Villegas, "Real-time position control in permanent magnet synchronous machine drives," 2018 20th European Conference on Power Electronics and Applications (EPE'18 ECCE Europe), Riga, Latvia, 2018, pp. P.1-P.8.
See Also
PMSM | Converter (Three-Phase) | Luenberger Observer