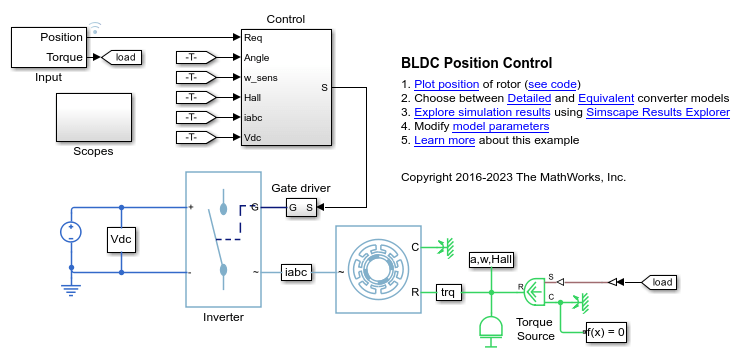
BLDC Position Control
This example shows how to control the rotor angle in a BLDC based electrical drive. An ideal torque source provides the load. The Control subsystem uses a PI-based cascade control structure with three control loops, an outer position control loop, a speed control loop and an inner current control loop. The BLDC is fed by a controlled three-phase inverter. The gate signals for the inverter are obtained from hall signals. The simulation uses step references. The Scopes subsystem contains scopes that allow you to see the simulation results.
Model
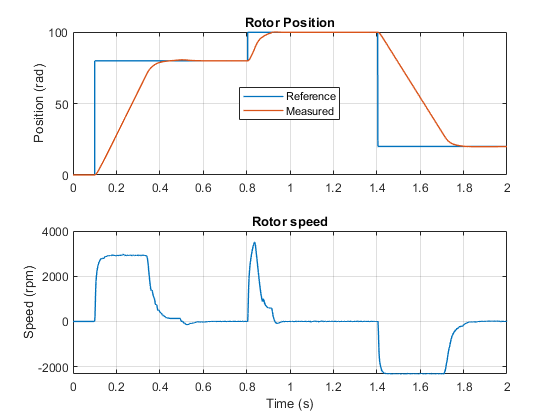
Simulation Results from Simscape Logging
The plot below shows the requested and measured angle for the test and the rotor speed in the electric drive.
See Also
BLDC | BLDC Current Controller | Converter (Three-Phase)