PMLSM
Permanent magnet linear synchronous motor with sinusoidal flux distribution

Libraries:
Simscape /
Electrical /
Electromechanical /
Permanent Magnet
Description
The PMLSM block models a permanent magnet linear synchronous motor (PMLSM) with a three-phase wye-wound stator. Use this block to model linear synchronous motors (LSMs) and linear servo motors. This figure shows the equivalent electrical circuit for the stator windings.
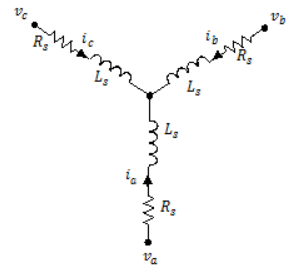
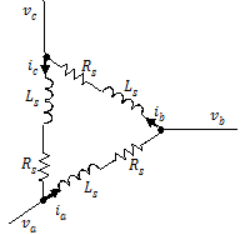
You can also model the permanent magnet linear synchronous motor in a
delta-wound configuration by setting Winding type to
Delta-wound.
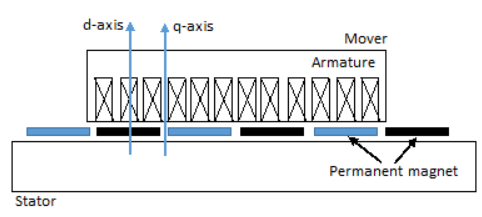
Motor Construction
This figure shows the motor construction.
Equations
Voltages across the stator windings are defined by:
where:
va, vb, and vc are the individual phase voltages across the stator windings.
Rs is the equivalent resistance of each stator winding.
ia, ib, and ic are the currents flowing in the stator windings.
, , and are the rates of change of magnetic flux in each stator winding.
The permanent magnet and the three windings contribute to the total flux linking each winding. The total flux is defined by:
where:
ψa, ψb, and ψc are the total fluxes linking each stator winding.
Laa, Lbb, and Lcc are the self-inductances of the stator windings.
Lab, Lac, Lba, Lbc, Lca, and Lcb are the mutual inductances of the stator windings.
ψam, ψbm, and ψcm are the permanent magnet fluxes linking the stator windings.
The inductances in the stator windings are functions of electrical angle, and are defined by:
and
where:
θe is the electrical angle.
rotor offset is
0if you define the rotor electrical angle with respect to the d-axis, or-pi/2if you define the rotor electrical angle with respect to the q-axis.and τ is the polar pitch.
x is the distance.
Ls is the per-phase stator self-inductance. This value is the average self-inductance of each of the stator windings.
Lm is the stator inductance fluctuation. This value is the fluctuation in self-inductance and mutual inductance with changing angle.
Ms is the stator mutual inductance. This value is the average mutual inductance between the stator windings.
The permanent magnet flux linking winding a is a maximum when θe = 0° and zero when θe = 90°. Therefore, the linked motor flux is defined by:
where ψm is the permanent magnet flux linkage.
Simplified Electrical Equations
Applying Park’s transformation to the electrical equations produces an expression for force that is independent of the angle.
Park’s transformation is defined by:
where θe is the electrical angle defined as Npx.
Using Park's transformation on the stator winding voltages and currents transforms them into the dq0 frame, which is independent of the angle:
and
Applying Park’s transformation to the first two electrical equations produces the following equations that define the block behavior:
and
where:
Ld = Ls + Ms + 3/2 Lm. Ld is the stator d-axis inductance.
Lq = Ls + Ms − 3/2 Lm. Lq is the stator q-axis inductance.
L0 = Ls – 2Ms. L0 is the stator zero-sequence inductance.
Rs is the stator resistance per phase.
v is the linear speed.
Np is the polar pitch factor.
M is the mass of the mover.
Bm is the damping.
FL is the load force.
The PMLSM block uses the original, nonorthogonal implementation of the Park transform. If you try to apply the alternative implementation, you get different results for the dq0 voltage and currents.
The relationship between the force constant kf, the back-emf constant ke, and the permanent magnet flux linkage is defined as follows:
Model Thermal Effects
You can expose thermal ports to model the effects of generated heat and motor temperature. To expose the thermal ports, set the Modeling option parameter to either:
No thermal port— The block contains expanded electrical conserving ports associated with the stator windings, but does not contain thermal ports.Show thermal port— The block contains expanded electrical conserving ports associated with the stator windings and thermal conserving ports for each of the windings and for the rotor.
For more information about using thermal ports in actuator blocks, see Simulating Thermal Effects in Rotational and Translational Actuators.
Variables
To set the priority and initial target values for the block variables before simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. You can specify nominal values using different sources, including the Nominal Values section in the block dialog box or Property Inspector. For more information, see System Scaling by Nominal Values.
Examples
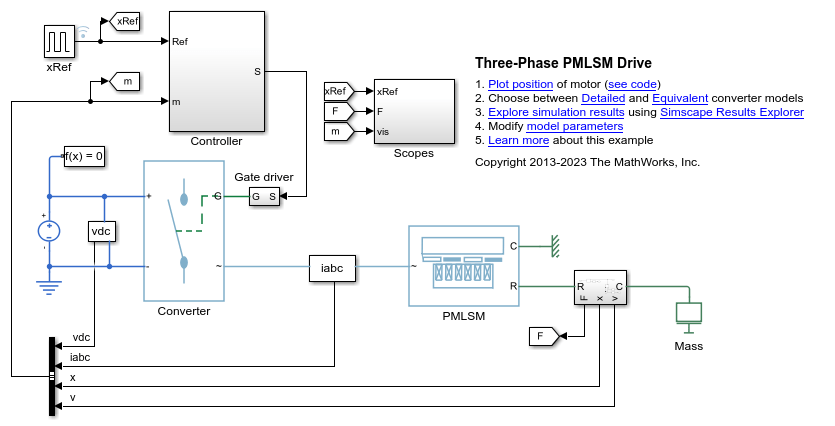
Three-Phase PMLSM Drive
Control the position in a three-phase permanent magnet linear synchronous machine (PMLSM) drive. The Control subsystem uses a PI-based cascade control structure with an outer position control loop, a speed control loop, and two inner current control loops. A controlled three-phase converter feeds the PMLSM. The simulation uses step references. The Scopes subsystem contains scopes that allow you to see the simulation results.
Ports
Conserving
Parameters
References
[1] Kundur, P. Power System Stability and Control. New York, NY: McGraw Hill, 1993.
[2] Anderson, P. M. Analysis of Faulted Power Systems. IEEE Press Power Systems Engineering Series, 1995. ISBN 0-7803-1145-0.
[3] X. Zhang and J. Pan. Nonlinear Robust Sliding Mode Control for PM Linear Synchronous Motors. 2006 CES/IEEE 5th International Power Electronics and Motion Control Conference, Shanghai, 2006, pp. 1–5.