Low-Pass Filter (Discrete or Continuous)
Discrete-time or continuous-time low-pass filter

Libraries:
Simscape /
Electrical /
Control /
General Control
Description
The Low-Pass Filter (Discrete or Continuous) block implements a low-pass filter in conformance with IEEE 421.5-2016[1]. In the standard, the filter is referred to as a Simple Time Constant.
You can switch between continuous and discrete implementations of the integrator using the Sample time parameter.
For a version of this block with the time constant as an external input, see the Low-Pass Filter (Variable Time Constant, Discrete or Continuous) block.
Equations
To configure the filter for continuous time, set the Sample
time property to 0. This representation is
equivalent to the continuous transfer function:
where:
K is the filter gain.
T is the filter time constant.
From the preceding transfer function, the filter defining equations are:
where:
u is filter input.
x is filter state.
y is filter output.
t is simulation time.
u0 is the initial input to the block.
To configure the filter for discrete time, set the Sample
time property to a positive, nonzero value, or to
-1 to inherit the sample time from an upstream block. The
discrete representation is equivalent to the transfer function:
where:
K is the filter gain.
T is the filter time constant.
Ts is the filter sample time.
From the discrete transfer function, the filter equations are defined using the forward Euler method:
where:
u is the filter input.
x is the filter state.
y is the filter output.
n is the simulation time step.
u0 is the initial input to the block.
Initial Conditions
To specify the initial conditions of this block, set Initialization to:
Inherited from block input— The block sets the state and output initial conditions to the initial input.Specify as parameter— The block sets the state initial condition to the value of Initial state.
Limiting the Integral
Set the Upper saturation limit and Lower saturation limit parameters to use the anti-windup saturation method.
The anti-windup method limits the integrator state between the lower saturation limit A and upper saturation limit B:
Because the state is limited, the output can respond immediately to a reversal of the input sign when the integral is saturated. This block diagram depicts the implementation of the anti-windup saturation method in the filter.

This block does not provide a windup saturation method. To use the windup
saturation method, set the Upper saturation limit parameter to
inf, the Lower saturation limit
parameter to -inf, and attach a saturation block
to the output.
Bypass Filter Dynamics
Set the time constant to a value smaller than or equal to the sample time to ignore the dynamics of the filter. When bypassed, the block feeds the gain-scaled input directly to the output:
In the continuous case, the sample time and time constant must both be zero.
Examples

Electric Engine Dyno
Model an electric vehicle dynamometer test. The test environment contains an asynchronous machine (ASM) and an interior permanent magnet synchronous machine (IPMSM) connected back-to-back through a mechanical shaft. Both machines are fed by high-voltage batteries through controlled three-phase converters. The 164 kW ASM produces the load torque. The 35 kW IPMSM is the electric machine under test. The Control Machine Under Test (IPMSM) subsystem controls the torque of the IPMSM. The controller includes a multi-rate PI-based control structure. The rate of the open-loop torque control is slower than the rate of the closed-loop current control. The task scheduling for the controller is implemented as a Stateflow® state machine. The Control Load Machine (ASM) subsystem uses a single rate to control the speed of the ASM. The Visualization subsystem contains scopes that allow you to see the simulation results.
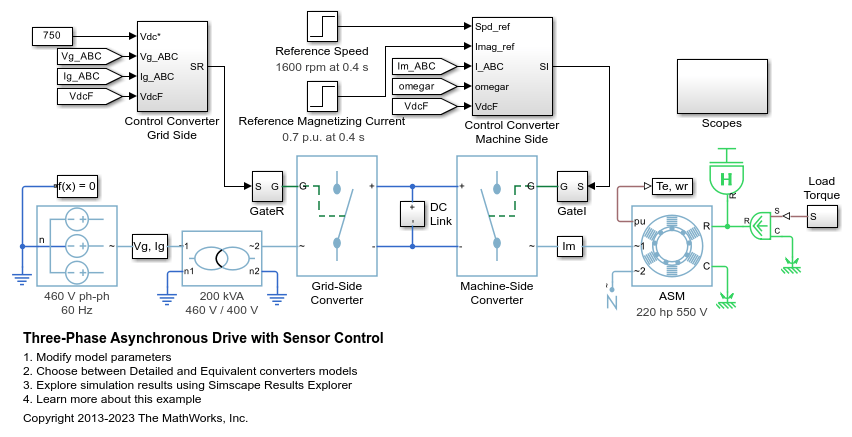
Three-Phase Asynchronous Drive with Sensor Control
Control and analyze the operation of an Asynchronous Machine (ASM) using sensored rotor field-oriented control. The model shows the main electrical circuit, with three additional subsystems containing the controls, measurements, and scopes. The Controls subsystem contains two controllers: one for the Grid-Side Converter (AC/DC) and one for the Machine-Side Converter (DC/AC). The Scopes subsystem contains two time scopes: one for the Grid-Side Converter and one for the ASM. When the model is executed, a Spectrum Analyzer opens and displays frequency data for the A-Phase Supply Current.
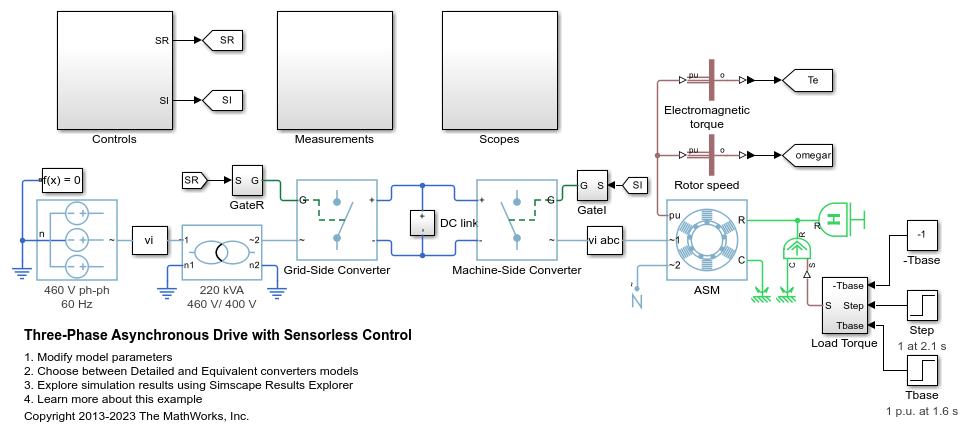
Three-Phase Asynchronous Drive with Sensorless Control
Control and analyze the operation of an Asynchronous Machine (ASM) using sensorless rotor field-oriented control. The model shows the main electrical circuit, with three additional subsystems containing the controls, measurements, and scopes. The Controls subsystem contains two controllers: one for the Grid-Side Converter (AC/DC) and one for the Machine-Side Converter (DC/AC). The Scopes subsystem contains two time scopes: one for the Grid-Side Converter and one for the ASM. When the model is executed, a Spectrum Analyzer opens and displays frequency data for the A-Phase Supply Current.
Ports
Input
Output
Parameters
References
[1] IEEE Recommended Practice for Excitation System Models for Power System Stability Studies. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.
Extended Capabilities
Version History
Introduced in R2017b