Controlled PWM Voltage
Pulse-width modulated voltage source

Libraries:
Simscape /
Electrical /
Integrated Circuits
Description
The Controlled PWM Voltage block represents a pulse-width modulated (PWM) voltage source. You can model electrical or physical signal input ports by setting the Modeling option parameter to either:
Electrical input ports— The block calculates the duty cycle based on the reference voltage across its ref+ and ref- ports. This option is the default.PS input— Specify the duty cycle value directly by using an input physical signal port.
If you set Modeling option to Electrical input
ports, the demanded duty cycle is
where:
Vref is the reference voltage across the ref+ and ref- ports.
Vmin is the minimum reference voltage.
Vmax is the maximum reference voltage.
The value of the Output voltage amplitude parameter determines amplitude of the output voltage.
At time zero, the pulse is initialized as high, unless the Pulse delay time parameter is greater than zero, or the demanded duty cycle is zero.
You can use parameters Pulse delay time and Pulse width offset to add a small turn-on delay and a small turn-off advance. This can be useful when fine-tuning switching times so as to minimize switching losses.
In PWM mode, the block has two options for the type of switching event when moving between output high and output low states:
Asynchronous – Best for variable-step solvers— Asynchronous events are better suited to variable step solvers, because they require fewer simulation steps for the same level of accuracy. In asynchronous mode the PWM switching events generate zero crossings, and therefore switching times are always determined accurately, regardless of the simulation maximum step size.Discrete—time – Best for fixed-step solvers— Discrete-time events are better suited to fixed-step operation, because then the switching events are always synchronized with the simulation step. Using an asynchronous implementation with fixed-step solvers may sometimes result in events being up to one simulation step late. For more information, see Simulating with Fixed Time Step — Local and Global Fixed-Step Solvers.
If you use a fixed-step or local solver and the discrete-time switching event type, the following restrictions apply to the Sample time parameter value:
The sample time must be a multiple of the simulation step size.
The sample time must be small compared to the PWM period, to ensure sufficient resolution.
Assumptions and Limitations
The model is based on the following assumptions:
The REF output of this block is floating, it is not tied to the Electrical Reference. One consequence of this is that if you connect the PWM and REF electrical ports directly to the PWM and REF electrical ports of an H-bridge or a gate driver, you must attach an Electrical Reference block to the REF connection line.
Do not connect the Controlled PWM block directly to a semiconductor gate, because this omits the gate driver output impedance that determines switching dynamics. Use a Gate Driver or a Half-Bridge Driver block to set the gate-source or the gate-emitter voltage.
Do not use the Controlled PWM block to drive a motor block directly. A PWM motor driver goes open circuit in between pulses. Use the H-Bridge block to drive a motor block.
When driving a motor via the H-Bridge block, set the Simulation mode parameter to
Averagedto speed up simulations. You must also set the Simulation mode parameter of the H-Bridge block toAveragedmode. This applies the average of the demanded PWM voltage to the motor. TheAveragedmode assumes that the impedance of the motor inductive term is small at the PWM frequency. To verify this assumption, run the simulation using thePWMmode and compare the results to those obtained from using theAveragedmode.If you are linearizing your model, set the Simulation mode parameter to
Averagedand ensure that you have specified the operating point of the block correctly. You can only linearize the block for inputs corresponding to a duty cycle greater than zero and less than 100 percent.When you use this block in
PWMmode with the Use local solver option selected in the Solver Configuration block, set the Switching event type parameter toDiscrete—time – Best for fixed-step solvers. Using theAsynchronous – Best for variable-step solversoption in this situation may produce inaccuracies, because simulation with the local solver implies fixed step, and the PWM events will not always coincide precisely with the simulation steps. This results in PWM events sometimes occurring one simulation step late.
Examples

Control DC Motor with PWM Voltage Source and H-Bridge Driver
Control a DC motor by using the Controlled PWM Voltage and H-Bridge blocks. The DC Motor block delivers a mechanical power of 10 W at 2500 rpm and turns at a no-load speed of 4000 rpm when the DC supply voltage is 12 V. Consequently, if you set the PWM reference voltage to its maximum value of 5 V, the motor runs at 4000 rpm. If you set the PWM reference voltage to 2.5 V, the motor runs at approximately 2000 rpm. To achieve fast simulation, this example sets the Simulation mode parameter of the Controlled PWM Voltage and H-Bridge blocks to Averaged. To validate the averaged behavior, set the Simulation mode parameter to PWM in both the Controlled PWM Voltage and H-Bridge blocks.
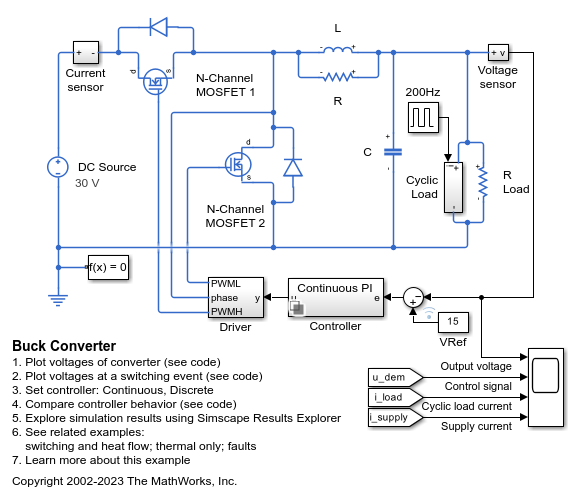
Buck Converter
Model a switching power supply that converts a 30V DC supply into a regulated 15V DC supply. Use this model to size the inductance L and the smoothing capacitor C and to design the feedback controller. Select between continuous and discrete controllers to explore the impact of the discretization.
Ports
Input
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2008b