Hydraulic Piston Regulator Tuning
This example shows how to tune a lead-lag regulator for a simplified hydraulic piston. The piston model is given by:
PlantModel = zpk(10,[0,0,-10],-1);
An initial controller design using the Control System Toolbox™ yields a controller:
Controller = zpk(-0.15, -3.5, 0.15);
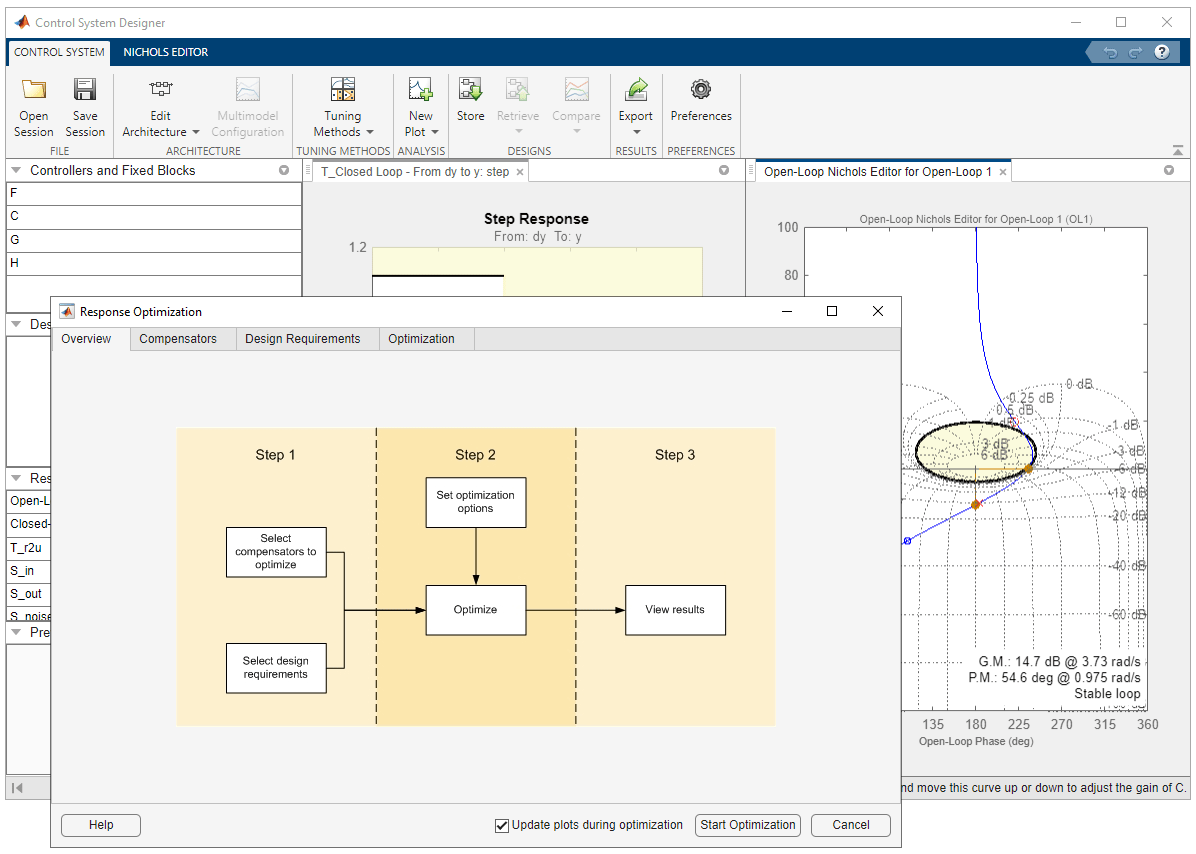
After loading the model and pre-configured Control System Designer, you can design a new controller using Response Optimization.
Requires Control System Toolbox.
Opening the Model and Control System Designer
Open the model and pre-configured Control System Designer using the command
controlSystemDesigner('piston_demoproject')
Design Overview
The goal of the design is to fine tune the designed regulator to better reject disturbances. The controller must satisfy the following requirements:
The closed-loop peak gain must be less than 1db; this ensures good regulation with minimum overshoot.
The output (y) resulting from a unit step output disturbance (dy) must be reduced by 99% within 10 seconds and no more than a 20% overshoot is allowed.
These design requirements have been added to the Control System Designer. To complete the design, using response optimization, click Start Optimization button in the Response Optimization window.