looptune
Tune MIMO feedback loops in Simulink using slTuner interface
Syntax
Description
[ tunes
the free parameters of
the control system of the Simulink® model associated with the st,gam,info]
= looptune(st0,controls,measurements,wc)slTuner interface, st0,
to achieve the following goals:
Bandwidth — Gain crossover for each loop falls in the frequency interval
wcPerformance — Integral action at frequencies below
wcRobustness — Adequate stability margins and gain roll-off at frequencies above
wc
controls and measurements specify
the controller output signals and measurement signals that are subject
to the goals, respectively. st is the updated slTuner interface, gam indicates
the measure of success in satisfying the goals, and info gives
details regarding the optimization run.
Tuning is performed at the sample time specified by the Ts property
of st0. For tuning algorithm details, see Algorithms.
[ tunes
the feedback loop to meet additional goals specified in one or more
tuning goal objects, st,gam,info]
= looptune(st0,controls,measurements,wc,req1,...,reqN)req. Omit wc to
drop the default loop shaping goal associated with wc.
Note that the stability margin goals remain in force.
[ specifies
further options, including target gain and phase margins, number of
runs, and computation options for the tuning algorithm. Use st,gam,info]
= looptune(___,opt)looptuneOptions to create opt.
If you specify multiple runs using the RandomStarts property
of opt, looptune performs
only as many runs required to achieve the target objective value of
1. Note that all tuning goals should be normalized so that a maximum
value of 1 means that all design goals are met.
Examples
Tune the PID Controller in the rct_engine_speed model to achieve the specified bandwidth.
Open the Simulink model.
mdl = 'rct_engine_speed';
open_system(mdl);
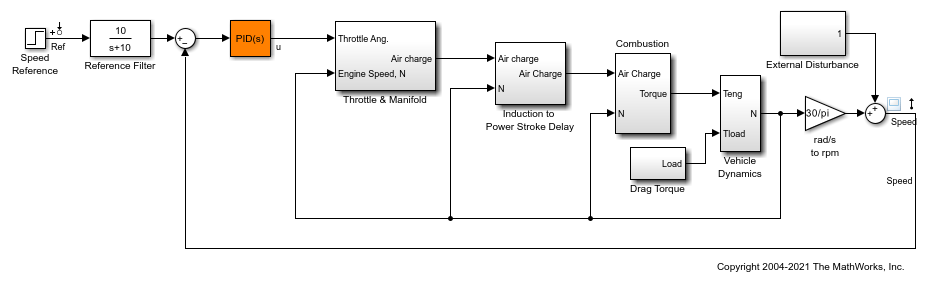
Create an slTuner interface for the model.
st0 = slTuner(mdl,'PID Controller');
Add the PID Controller output, u, as an analysis point to st0.
addPoint(st0,'u');
Based on first-order characteristics, the crossover frequency should exceed 1 rad/s for the closed-loop response to settle in less than 5 seconds. So, tune the PID loop using 1 rad/s as the target 0 dB crossover frequency.
wc = 1; st = looptune(st0,'u','Speed',wc);
Final: Peak gain = 0.93, Iterations = 5 Achieved target gain value TargetGain=1.
In the call to looptune, 'u' specifies the control signal, and 'Speed' specifies the measured signal.
Compare the tuned and initial response.
stepplot(getIOTransfer(st0,'Ref','Speed'),getIOTransfer(st,'Ref','Speed')); legend('Initial','Speed');

View the tuned block value.
showTunable(st)
Block 1: rct_engine_speed/PID Controller =
1 s
Kp + Ki * --- + Kd * --------
s Tf*s+1
with Kp = 0.0011, Ki = 0.00344, Kd = 0.000206, Tf = 0.01
Name: PID_Controller
Continuous-time PIDF controller in parallel form.
To write the tuned values back to the Simulink model, use writeBlockValue.
Input Arguments
Output Arguments
More About
Algorithms
looptune automatically converts target
bandwidth, performance goals, and additional design goals into weighting
functions that express the goals as an H∞ optimization
problem. looptune then uses systune to optimize tunable parameters
to minimize the H∞ norm.
For information about the optimization algorithms, see [1].
looptune computes the H∞
norm using the algorithm of [2] and structure-preserving eigensolvers from the SLICOT library. For more information
about the SLICOT library, see https://github.com/SLICOT.
References
[1] P. Apkarian and D. Noll, "Nonsmooth H-infinity Synthesis." IEEE Transactions on Automatic Control, Vol. 51, Number 1, 2006, pp. 71–86.
[2] Bruinsma, N.A., and M. Steinbuch. "A Fast Algorithm to Compute the H∞ Norm of a Transfer Function Matrix." Systems & Control Letters, 14, no.4 (April 1990): 287–93.
Extended Capabilities
Version History
Introduced in R2014a
See Also
looptune
(for genss) | looptuneOptions | TuningGoal.Tracking | TuningGoal.Gain | TuningGoal.Margins | slTuner | addPoint | getIOTransfer | getLoopTransfer | writeBlockValue | systune | hinfstruct (Robust Control Toolbox)