Open-Loop PID Autotuner
Automatically tune PID gains based on plant frequency responses estimated from open-loop experiment in real time
Libraries:
Simulink Control Design /
Autotuning
Description
The Open-Loop PID Autotuner block lets you tune a PID controller in real time against a physical plant. The block can tune a PID controller to achieve a specified bandwidth and phase margin without a parametric plant model or an initial controller design. If you have a code-generation product such as Simulink® Coder™, you can generate code that implements the tuning algorithm on hardware, letting you tune in real time with or without using Simulink to manage the autotuning process.
If you have a plant model in Simulink, you can also use the block to obtain an initial PID design. Doing so lets you preview plant response and adjust the settings for PID autotuning before tuning the controller in real time.
To achieve model-free tuning, the Open-Loop PID Autotuner block:
Injects a test signal into the plant at the nominal operating point to collect plant input-output data and estimate frequency response in real time. The test signal is a combination of sine and step perturbation signals added on top of the nominal plant input measured when the experiment starts. If the plant is part of a feedback loop, the block opens the loop during the experiment.
At the end of the experiment, tunes PID controller parameters based on estimated plant frequency responses near the open-loop bandwidth.
Updates a PID Controller block or a custom PID controller with the tuned parameters, allowing you to validate closed-loop performance in real time.
Because the block performs an open-loop estimation experiment, do not use this block with an unstable plant or a plant with multiple integrators.
To use the algorithm, you do not need an initial PID controller design. However, you must have some way to get the plant to a nominal operating point for the frequency-response estimation experiment. If you have an initial controller design, you can use the Closed-Loop PID Autotuner. For a comparison of closed-loop and open-loop PID autotuning, see When to Use PID Autotuning.
The block supports code generation with Simulink Coder, Embedded Coder®, and Simulink PLC Coder™. It does not support code generation with HDL Coder™.
For more information about using the Open-Loop PID Autotuner block, see:
For more general information about PID autotuning and a comparison of the closed-loop and open-loop approaches, see When to Use PID Autotuning.
Examples
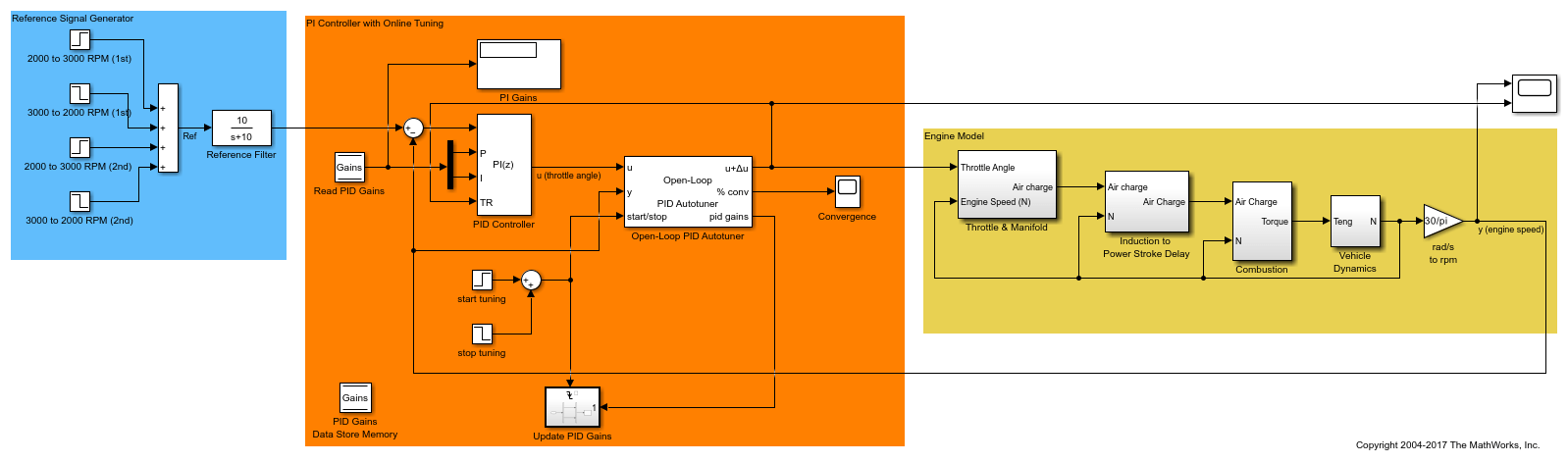
Tune PID Controller in Real Time Using Open-Loop PID Autotuner Block
Tune a single-loop PID controller in real time by injecting sinusoidal perturbation signals at the plant input and measuring the plant output during an open-loop experiment.
Ports
Input
Insert the block into your system such that this port accepts a control signal from a source. Typically, this port accepts the signal from the PID controller in your system.
Data Types: single | double
Connect this port to the plant output.
Data Types: single | double
To start and stop the autotuning process, provide a signal at the
start/stop port. When the value of the signal changes
from:
Negative or zero to positive, the experiment starts
Positive to negative or zero, the experiment stops
When the experiment is not running, the block passes signals unchanged from u to u+Δu. In this state, the block has no impact on plant or controller behavior.
Typically, you can use a signal that changes from 0 to 1 to start the experiment, and from 1 to 0 to stop it. Some points to consider when configuring the start/stop signal include:
Start the experiment when the plant is at the desired equilibrium operating point. Use the initial controller to drive the plant to the operating point. If you have no initial controller (open-loop tuning only) you can use a source block connected to u to drive the plant to the operating point.
Avoid any load disturbance to the plant during the experiment. Load disturbance can distort the plant output and reduce the accuracy of the frequency-response estimation.
Let the experiment run long enough for the algorithm to collect sufficient data for a good estimate at all frequencies it probes. There are two ways to determine when to stop the experiment:
Determine the experiment duration in advance. A conservative estimate for the experiment duration is 200/ωc for closed-loop tuning, or 100/ωc for open-loop tuning, where ωc is your target bandwidth.
Observe the signal at the
% convoutput, and stop the experiment when the signal stabilizes near 100%.
When you stop the experiment, the block computes tuned PID gains and updates the signal at the
pid gainsport.
You can configure any logic appropriate for your application to control the start and stop times of the experiment.
Data Types: single | double
Supply a value for the Target bandwidth (rad/sec) parameter. See that parameter for details.
Dependencies
To enable this port, in the Tuning tab, next to Target bandwidth (rad/sec), select Use external source.
Data Types: single | double
Supply a value for the Target phase margin (degrees) parameter. See that parameter for details.
Dependencies
To enable this port, in the Tuning tab, next to Target phase margin (degrees), select Use external source.
Data Types: single | double
Supply a value for the Sine Amplitudes parameter. See that parameter for details.
Dependencies
To enable this port, in the Experiment tab, next to Sine Amplitudes, select Use external source.
Data Types: single | double
Supply a value for the Step Amplitude parameter.
See that parameter for details.
Dependencies
To enable this port, in the Experiment tab, next to Step
Amplitudes, select Use external
source.
Data Types: single | double
Output
Insert the block into your system such that this port feeds the input signal to your plant.
When the experiment is running (
start/stoppositive), the block injects test signals into the plant at this port. The test signal is the value at u when the experiment begins plus the experiment perturbation. If you have any saturation or rate limit protecting the plant, feed the signal from u+Δu into it.When the experiment is not running (
start/stopzero or negative), the block passes signals unchanged from u to u+Δu.
Data Types: single | double
When the experiment is running (start/stop positive), the block
injects test signals into the plant and measures the plant response at
y. It uses these signals to estimate the frequency response of
the plant at several frequencies around the target bandwidth for tuning. %
conv indicates how close to completion the estimation of the plant
frequency response is. Typically, this value quickly rises to about 90% after the
experiment begins, and then gradually converges to a higher value. Stop the experiment
when it levels off near 100%.
Data Types: single | double
This 4-element bus signal contains the tuned PID gains P,
I, D, and the filter coefficient
N. These values correspond to the P,
I, D, and N parameters in
the expressions given in the Form parameter. Initially, the values
are 0, 0, 0, and 100, respectively. The block updates the values when the experiment
ends. This bus signal always has four elements, even if you are not tuning a PIDF
controller.
If you have a PID controller associated with the block, you can update that controller with these values after the experiment ends. To do so, in the Block tab, click Update PID Block.
Data Types: single | double
This port outputs the estimated phase margin achieved by the tuned controller, in degrees. The block updates this value when the tuning experiment ends. The estimated phase margin is calculated from the angle of G(jωc)C(jωc), where G is the estimated plant, C is the tuned controller, and ωc is the crossover frequency (bandwidth). The estimated phase margin might differ from the target phase margin specified by the Target phase margin (degrees) parameter. It is an indicator of the robustness and stability achieved by the tuned system.
Typically, the estimated phase margin is near the target phase margin. In general, the larger the value, the more robust is the tuned system, and the less overshoot there is.
A negative phase margin indicates that the closed-loop system might be unstable.
Dependencies
To enable this port, in the Tuning tab, select Output estimated phase margin achieved by tuned controller.
This port outputs the frequency-response data estimated by the
experiment. Initially, the value at frd is [0, 0,
0, 0]. During the experiment, the block injects signals at frequencies [1/3, 1, 3,
10]ωc, where ωc is
the target bandwidth. At each sample time during the experiment, the
block updates frd with a vector containing the
complex frequency response at each of these frequencies, respectively.
You can use the progress of the response as an alternative to
% conv to examine the convergence of the
estimation. When the experiment stops, the block updates
frd with the final estimated frequency response
used for computing the PID gains.
Dependencies
To enable this port, in the Experiment tab, select Plant frequency responses near bandwidth.
If you select Estimate DC gain with step signal in the Experiment tab, the block estimates the DC gain of the plant by including a step signal in the injected perturbation. When the experiment stops, the block updates this port with the estimated DC gain value.
Dependencies
To enable this port, in the Experiment tab, select Plant DC Gain.
This port outputs a vector containing the plant input (u+Δu) and plant output (y) when the experiment begins. These values are the plant input and output at the nominal operating point at which the block performs the experiment.
Dependencies
To enable this port, in the Experiment tab, select Plant nominal input and output.
Parameters
Tuning Tab
Specify the type of the PID controller in your system. The controller type indicates what actions are present in the controller. The following controller types are available for PID autotuning:
P— Proportional onlyI— Integral onlyPI— Proportional and integralPD— Proportional and derivativePDF— Proportional and derivative with derivative filterPID— Proportional, integral, and derivativePIDF— Proportional, integral, and derivative with derivative filter
When you update a PID Controller block or custom PID controller with tuned parameter values, make sure the controller type matches.
Tunable: Yes
Programmatic Use
Block Parameter: PIDType |
| Type: character vector |
Values: 'P' | 'I' | 'PI' | 'PD' | 'PDF' | 'PID' | 'PIDF' |
Default: 'PI' |
Specify the controller form. The controller form determines the interpretation of the PID coefficients P, I, D, and N.
Parallel— InParallelform, the transfer function of a discrete-time PIDF controller is:where Fi(z) and Fd(z) are the integrator and filter formulas (see
Integrator methodandFilter method). The transfer function of a continuous-time parallel-form PIDF controller is:Other controller actions amount to setting P, I, or D to zero.
Ideal— InIdealform, the transfer function of a discrete-time PIDF controller is:The transfer function of a continuous-time ideal-form PIDF controller is:
Other controller actions amount to setting D to zero or setting, I to
Inf. (In ideal form, the controller must have proportional action.)
When you update a PID Controller block or custom PID controller with tuned parameter values, make sure the controller form matches.
Programmatic Use
Block Parameter: PIDForm |
| Type: character vector |
Values: 'Parallel' | 'Ideal' |
Default: 'Parallel' |
Tunable: Yes
Specify whether your PID controller is a discrete-time or continuous-time controller.
For discrete time, you must specify the sample time of your PID controller using the Controller sample time (sec) parameter.
For continuous time, you must also specify a sample time for the PID autotuning experiment using the Experiment sample time (sec) parameter.
Programmatic Use
Block Parameter:
TimeDomain |
| Type: character vector |
Values:
'discrete-time' |
'continuous-time' |
Default:
'discrete-time' |
Specify the sample time of your PID controller in seconds. This value also sets the sample time for the experiment performed by the block.
To perform PID tuning, the block measures frequency-response information up to a frequency of 10 times the target bandwidth. To ensure that this frequency is less than the Nyquist frequency, the target bandwidth, ωc, must satisfy ωcTs ≤ 0.3, where Ts ωc is the controller sample time that you specify with the Controller sample time (sec) parameter.
When you update a PID Controller block or custom PID controller with tuned parameter values, make sure the controller sample time matches.
Tips
If you want to run the deployed block with different sample times in your application, set this parameter to –1 and put the block in a Triggered Subsystem. Then, trigger the subsystem at the desired sample time. If you do not plan to change the sample time after deployment, specify a fixed and finite sample time.
Dependencies
To enable this parameter, set Time Domain to
discrete-time.
Programmatic Use
Block Parameter:
DiscreteTs |
| Type: scalar |
| Value positive scalar | –1 |
| Default: 0.1 |
Even when you tune a continuous-time controller, you must specify a sample time for the experiment performed by the block. In general, continuous-time controller tuning is not recommended for PID autotuning against a physical plant. If you want to tune in continuous time against a Simulink model of the plant, use a fast experiment sample time, such as 0.02/ωc.
Dependencies
This parameter is enabled when the Time Domain is
continuous-time.
Programmatic Use
Block Parameter:
ContinuousTs |
| Type: positive scalar |
| Default: 0.02 |
Specify the discrete integration formula for the integrator term in your controller. In discrete time, the PID controller transfer function assumed by the block is:
in parallel form, or in ideal form,
For a controller sample time Ts, the
Integrator method parameter determines the formula
Fi as follows:
| Integrator method | Fi |
|---|---|
Forward Euler |
|
Backward Euler |
|
Trapezoidal |
|
For more information about the relative advantages of each method, see the Discrete PID Controller block reference page.
When you update a PID Controller block or custom PID controller with tuned parameter values, make sure the integrator method matches.
Dependencies
This parameter is enabled when the Time Domain is discrete-time and the controller includes integral action.
Programmatic Use
Block Parameter: IntegratorFormula |
| Type: character vector |
Values: 'Forward Euler' | 'Backward Euler' | 'Trapezoidal' |
Default: 'Forward Euler' |
Tunable: Yes
Specify the discrete integration formula for the derivative filter term in your controller. In discrete time, the PID controller transfer function assumed by the block is:
in parallel form, or in ideal form,
For a controller sample time Ts, the
Filter method parameter determines the formula
Fd as follows:
| Filter method | Fd |
|---|---|
Forward Euler |
|
Backward Euler |
|
Trapezoidal |
|
For more information about the relative advantages of each method, see the Discrete PID Controller block reference page.
When you update a PID Controller block or custom PID controller with tuned parameter values, make sure the filter method matches.
Dependencies
This parameter is enabled when the Time Domain is
discrete-time and the controller includes a derivative filter
term.
Programmatic Use
Block Parameter: FilterFormula |
| Type: character vector |
Values: 'Forward Euler' | 'Backward Euler' | 'Trapezoidal' |
Default: 'Forward Euler' |
Tunable: Yes
The target bandwidth, specified in rad/sec, is the target value for the 0-dB gain crossover frequency of the tuned open-loop response CP, where P is the plant response, and C is the controller response. This crossover frequency roughly sets the control bandwidth. For a rise-time τ seconds, a good guess for the target bandwidth is 2/τ rad/sec.
To perform PID tuning, the autotuner block measures frequency-response information up to a frequency of 10 times the target bandwidth. To ensure that this frequency is less than the Nyquist frequency, the target bandwidth, ωc, must satisfy ωcTs ≤ 0.3, where Ts is the controller sample time that you specify with the Controller sample time (sec) parameter. Because of this condition, the fastest rise time you can enforce for tuning is about 6.67Ts. If this rise time does not meet your design goals, consider reducing Ts.
To provide the target bandwidth via an input port, select Use external source.
Programmatic Use
Block Parameter:
Bandwidth |
| Type: positive scalar |
Default:
1 |
Specify a target minimum phase margin for the tuned open-loop response at the crossover frequency. The target phase margin reflects desired robustness of the tuned system. Typically, choose a value in the range of about 45°–60°. In general, higher phase margin improves overshoot, but can limit response speed. The default value, 60°, tends to balance performance and robustness, yielding about 5–10% overshoot, depending on the characteristics of your plant.
To provide the target phase margin via an input port, select Use external source.
Tunable: Yes
Programmatic Use
Block Parameter: TargetPM |
| Type: scalar |
| Values: 0–90 |
| Default: 60 |
Experiment Tab
During the tuning experiment, the block injects a sinusoidal signal into the plant at the frequencies [1/3, 1, 3, 10]ωc , where ωc is the target bandwidth for tuning. Use Sine Amplitudes to specify the amplitude of each of these injected signals. Specify a:
Scalar value to inject the same amplitude at each frequency
Vector of length 4 to specify a different amplitude at each of [1/3, 1, 3, 10]ωc
In a typical plant with typical target bandwidth, the magnitudes of the plant responses at the experiment frequencies do not vary widely. In such cases, you can use a scalar value to apply the same magnitude perturbation at all frequencies. However, if you know that the response decays sharply over the frequency range, consider decreasing the amplitude of the lower-frequency inputs and increasing the amplitude of the higher-frequency inputs. It is numerically better for the estimation experiment when all the plant responses have comparable magnitudes.
The perturbation amplitudes must be:
Large enough that the perturbation overcomes any deadband in the plant actuator and generates a response above the noise level
Small enough to keep the plant running within the approximately linear region near the nominal operating point, and to avoid saturating the plant input or output
In the experiment, the sinusoidal signals are superimposed (with the step perturbation, if any, in the case of open-loop tuning). Thus, the perturbation can be at least as large as the sum of all amplitudes. Therefore, to obtain appropriate values for the amplitudes, consider:
Actuator limits. Make sure that the largest possible perturbation is within the range of your plant actuator. Saturating the actuator can introduce errors into the estimated frequency response.
How much the plant response changes in response to a given actuator input at the nominal operating point for tuning. For instance, suppose that you are tuning a PID controller used in engine-speed control. You have determined that at frequencies around the target bandwidth, a 1° change in throttle angle causes a change of about 200 rpm in the engine speed. Suppose further that to preserve linear performance the speed must not deviate by more than 100 rpm from the nominal operating point. In this case, choose amplitudes to ensure that the perturbation signal is no greater than 0.5 (assuming that value is within actuator limits).
To provide the sine amplitudes via an input port, select Use external source.
Tunable: Yes
Programmatic Use
Block Parameter:
AmpSine |
| Type: scalar, vector of length 4 |
| Default: 1 |
When this option is selected, the experiment includes an estimation of the plant DC gain. The block performs this estimation by injecting a step signal into the plant.
Caution
If your plant has a single integrator, clear this option. For plants with multiple integrators or unstable poles, do not use the Open-Loop PID Autotuner block.
Tunable: Yes
Programmatic Use
Block Parameter:
EstimateDCGain |
| Type: character vector |
Values:
'off' | 'on'
|
Default:
'on' |
If Estimate DC gain with step signal is selected, the block estimates the DC gain by injecting a step signal into the plant. Use this parameter to set the amplitude of the signal. The considerations for choosing a step amplitude are the same as the considerations for specifying Sine Amplitudes.
To provide the step amplitude via an input port, select Use external source.
Tunable: Yes
Dependencies
This parameter is enabled when Estimate DC gain with step signal is selected.
Programmatic Use
Block Parameter:
AmpStep |
| Type: scalar |
| Default: 1 |
Block Tab
The block contains two modules, one that performs the real-time frequency-response estimation, and one that uses the resulting estimated response to tune the PID gains. When you run a Simulink model containing the block in the external simulation mode, by default both modules are deployed. You can save memory on the target hardware by deploying the estimation module only (see Control Real-Time PID Autotuning in Simulink). In this case, the tuning algorithm runs on the Simulink host computer instead of the target hardware. When this option is selected, the deployed algorithm uses about a third as much memory as when the option is cleared.
The PID gain calculation demands more computational load than the frequency-response estimation. For fast controller sample times, some hardware might not finish the gain calculation within one execution cycle. Therefore, when using hardware with limited computing power, selecting this option lets you tune a PID controller with a fast sample time.
Additionally, when you enable this option, there can be a delay of several sampling periods between when the tuning experiment ends and when the new PID gains arrive at the pid gains output port. Before pushing gains to the controller, first confirm the change at the pid gains output port instead of using start/stop signal as the trigger for the update.
If you intend to deploy the block and perform PID tuning without using external simulation mode, do not select this option.
Caution
When you use this option, the model must be configured such that numeric block parameters are tunable in generated code, not inlined. To specify tunable parameters:
In the model editor: In Configuration Parameters, in Code Generation > Optimization, set Default parameter behavior to
Tunable.At the command line: Use
set_param(mdl,'DefaultParameterBehavior','Tunable').
Programmatic Use
Block Parameter:
DeployTuningModule |
| Type: character vector |
Values:
'off' | 'on'
|
Default:
'off' |
Select this parameter if you are using Simulink PLC Coder to generate code for the autotuner block. Clear the parameter for code generation with any other MathWorks® code-generation product.
Selecting this parameter affects internal block configuration only, for compatibility with Simulink PLC Coder. The parameter has no operative effect on generated code.
Specify the floating-point precision based on simulation environment or hardware requirements.
Programmatic Use
Block Parameter:
BlockDataType |
| Type: character vector |
Values:
'double' | 'single'
|
Default:
'double' |
Under some conditions, the autotuner block can write tuned gains to a standard or custom PID controller block. To indicate that the target PID controller is the block connected to the u port of the autotuner block, select this option. To specify a PID controller that is not connected to u, clear this option.
To write tuned gains from the autotuner block to a PID controller anywhere in the model, the target block must be either:
A PID Controller or Discrete PID Controller block.
A masked subsystem in which the PID coefficients are mask parameters named
P,I,D, andN, or whatever subset of these parameters exist in the your controller. For example, if you use a custom PI controller, then you only need mask parametersPandI.
Under some conditions, the autotuner block can write tuned gains to a standard or custom PID controller block. Use this parameter to specify the path of the target PID controller.
To write tuned gains from the autotuner block to a PID controller anywhere in the model, the target block must be either:
A PID Controller or Discrete PID Controller block.
A masked subsystem in which the PID coefficients are mask parameters named
P,I,D, andN, or whatever subset of these parameters exist in your controller
Dependencies
This parameter is enabled when Clicking "Update PID Block" writes tuned gains to the PID block connected to "u" port is selected.
The block does not automatically push the tuned gains to the target PID block. If your PID controller block meets the criteria described in the Specify PID block path parameter description, after tuning, click this button to transfer the tuned gains to the block.
You can update the PID block while the simulation is running, including when running in external mode. Doing so is useful for immediately validating tuned PID gains. At any time during simulation, you can change parameters, start the experiment again, and push the new tuned gains to the PID block. You can then continue to run the model and observe the behavior of your plant.
When you click this button, the block creates a structure in the
MATLAB® workspace containing the experiment and tuning results. This
structure, OnlinePIDTuningResult, contains the following
fields:
P,I,D,N— Tuned PID gains. The structure contains whichever of these fields are necessary for the controller type you are tuning. For instance, if you are tuning a PI controller, the structure containsPandI, but notDandN.TargetBandwidth— The value you specified in the Target bandwidth (rad/sec) parameter of the block.TargetPhaseMargin— The value you specified in the Target phase margin (degrees) parameter of the block.EstimatedPhaseMargin— Estimated phase margin achieved by the tuned system.Controller— The tuned PID controller, returned as apid(for parallel form) orpidstd(for ideal form) model object.Plant— The estimated plant, returned as anfrdmodel object. Thisfrdcontains the response data obtained at the experiment frequencies [1/3, 1, 3, 10]ωc.PlantNominal— The plant input and output at the nominal operating point when the experiment begins, specified as a structure having fieldsu(input) andy(output).PlantDCGain— The estimated DC gain of the system in absolute units, if Estimate DC gain with step signal is selected during tuning.
You can export to the MATLAB workspace while the simulation is running, including when running in external mode.
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
PLC Code Generation
Generate Structured Text code using Simulink® PLC Coder™.
Version History
Introduced in R2017bThe Open-Loop PID Controller block is now in the Simulink Control Design/Autotuner sublibrary.
In R2023b, when you open a model saved in a previous release, the library links for Open-Loop PID Controller blocks update automatically.
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)