Model Differential Algebraic Equations
Overview of Robertson Reaction Example
Robertson [1] created a system of autocatalytic chemical reactions to test and compare numerical solvers for stiff systems. The reactions, rate constants (k), and reaction rates (V) for the system are given as follows:
Because there are large differences between the reaction rates, the numerical solvers see the differential equations as stiff. For stiff differential equations, some numerical solvers cannot converge on a solution unless the step size is extremely small. If the step size is extremely small, the simulation time can be unacceptably long. In this case, you need to use a numerical solver designed to solve stiff equations.
Simulink Models from ODE and DAE Equations
This example uses these three models:
ex_hb1ode— Simulink® model from ordinary differential equations (ODE).ex_hb1dae— Simulink model from differential algebraic equations (DAE).ex_h1bdae_acb— Simulink model from DAE equations using Algebraic Constraint block.
To access these files, open the live script.
Simulink Model from ODE Equations
A system of ordinary differential equations (ODE) has the following characteristics:
All of the equations are ordinary differential equations.
Each equation is the derivative of a dependent variable with respect to one independent variable, usually time.
The number of equations is equal to the number of dependent variables in the system.
Using the reaction rates, you can create a set of differential equations describing the rate of change for each chemical species. Since there are three species, there are three differential equations in the mathematical model.
Initial conditions: , , and .
Build the Model
Create a model, or open the model ex_hb1ode.
Add three Integrator blocks to your model. Label the inputs
A',B', andC', and the outputsA,B, andCrespectively.Add Sum, Product, and Gain blocks to solve each differential variable. For example, to model the signal
C':Add a Math Function block and connect the input to signal
B. Set the Function parameter tosquare.Connect the output from the Math Function block to a Gain block. Set the Gain parameter to
3e7.Continue to add the remaining differential equation terms to your model.
Model the initial condition of
Aby setting the Initial condition parameter for theAIntegrator block to1.Add Out blocks to save the signals
A,B, andCto the MATLAB® variableyout.

Simulate the Model
Create a script that uses the sim function to simulate your model. This
script saves the simulation results in the MATLAB variable yout. Since the simulation has a long time
interval and B initially changes very fast, plotting values on a
logarithmic scale helps to visually compare the results. Also, since the value of
B is small relative to the values of A and
C, multiply B by before plotting the values.
Enter the following statements in a MATLAB script. If you built your own model, replace
ex_hblodewith the name of your model.sim('ex_hb1ode') yout(:,2) = 1e4*yout(:,2); figure; semilogx(tout,yout); xlabel('Time'); ylabel('Concentration'); title('Robertson Reactions Modeled with ODEs')
From the Simulink® Editor, on the Modeling tab, click Model Settings.
In the Solver pane, set the Stop time to
4e5and the Solver toode15s (stiff/NDF).In the Data Import pane, select Time and Output.
Run the script. Observe that all of
Ais converted toC.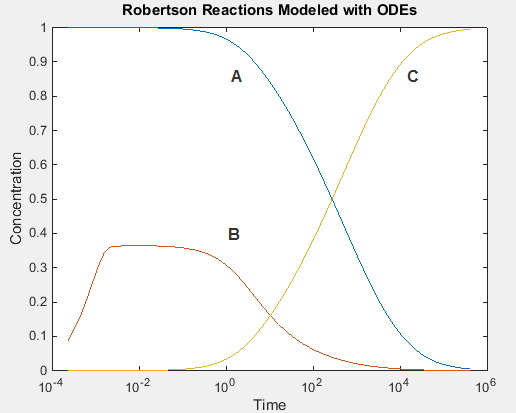
Simulink Model from DAE Equations
A system of differential algebraic equations (DAE) has the following characteristics:
It contains both ordinary differential equations and algebraic equations. Algebraic equations do not have any derivatives.
Only some of the equations are differential equations defining the derivatives of some of the dependent variables. The other dependent variables are defined with algebraic equations.
The number of equations is equal to the number of dependent variables in the system.
Some systems contain constraints due to conservation laws, such as conservation of mass and energy. If you set the initial concentrations to , , and , the total concentration of the three species is always equal to since . You can replace the differential equation for with the following algebraic equation to create a set of differential algebraic equations (DAEs).
The differential variables A and B uniquely
determine the algebraic variable C.
Initial conditions: and .
Build the Model
Make these changes to your model or to the model ex_hb1ode, or open the
model ex_hb1dae.
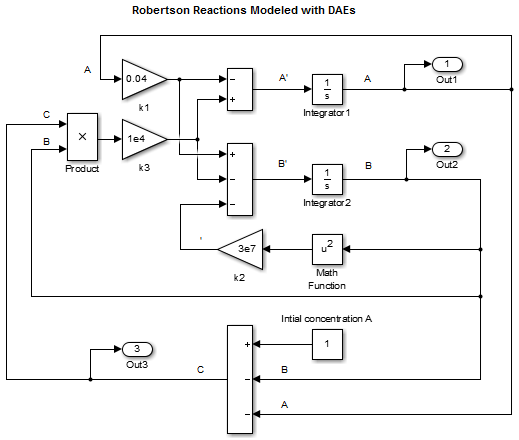
Delete the Integrator block for calculating
C.Add a Sum block and set the List of signs parameter to +– –.
Connect the signals
AandBto the minus inputs of the Sum block.Model the initial concentration of
Awith a Constant block connected to the plus input of the Sum block. Set the Constant value parameter to1.Connect the output of the Sum block to the branched line connected to the Product and Out blocks.
Simulate the Model
Create a script that uses the sim function to simulate your model.
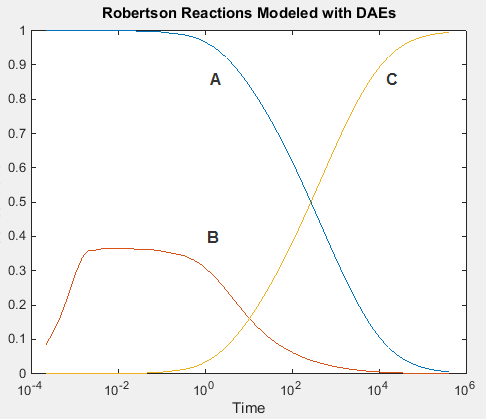
Enter the following statements in a MATLAB script. If you built your own model, replace
ex_hbldaewith the name of your model.sim('ex_hb1dae') yout(:,2) = 1e4*yout(:,2); figure; semilogx(tout,yout); xlabel('Time'); ylabel('Concentration'); title('Robertson Reactions Modeled with DAEs')
From the Simulink Editor, on the Modeling tab, click Model Settings.
In the Solver pane, set the Stop time to
4e5and the Solver toode15s (stiff/NDF).In the Data Import pane, select Time and Output.
Run the script. The simulation results when you use an algebraic equation are the same as for the model simulation using only differential equations.
Simulink Model from DAE Equations Using Algebraic Constraint Block
Some systems contain constraints due to conservation laws, such as conservation of mass and energy. If you set the initial concentrations to, , and , the total concentration of the three species is always equal to since .
You can replace the differential equation for with an algebraic equation modeled using an Algebraic Constraint block and a Sum block. The Algebraic Constraint block constrains its input signal F(z) to zero and outputs an algebraic state z. In other words, the block output is a value needed to produce a zero at the input. Use the following algebraic equation for input to the block.
The differential variables A and B uniquely
determine the algebraic variable C.
Initial conditions: , , and .
Build the Model
Make these changes to your model or to the model ex_hb1ode, or open the
model ex_hb1dae_acb.
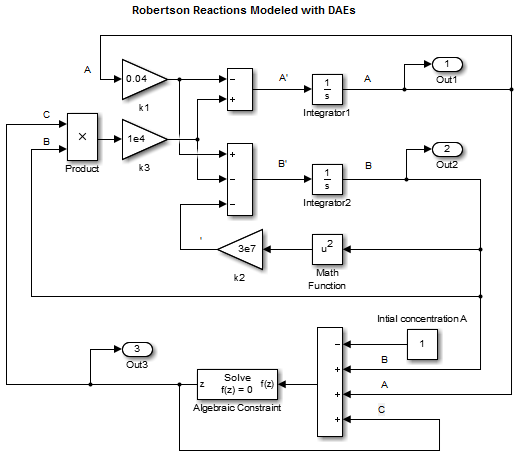
Delete the Integrator block for calculating
C.Add an Algebraic Constraint block. Set the Initial guess parameter to
1e-3.Add a Sum block. Set the List of signs parameter to –+++.
Connect the signals
AandBto plus inputs of the Sum block.Model the initial concentration of
Awith a Constant block connected to the minus input of the Sum block. Set the Constant value parameter to1.Connect the output of the Algebraic Constraint block to the branched line connected to the Product and Out block inputs.
Create a branch line from the output of the Algebraic Constraint block to the final plus input of the Sum block.
Simulate the Model
Create a script that uses the sim function to simulate your model.
Enter the following statements in a MATLAB script. If you built your own model, replace
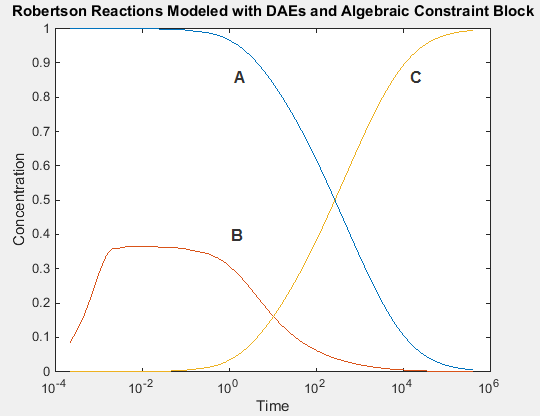
ex_hbl_acbwith the name of your model.sim('ex_hb1dae_acb') yout(:,2) = 1e4*yout(:,2); figure; semilogx(tout,yout); xlabel('Time'); ylabel('Concentration'); title('Robertson Reactions Modeled with DAEs and Algebraic Constraint Block')
From the Simulink Editor, on the Modeling tab, click Model Settings.
In the Solver pane, set the Stop time to
4e5and the Solver toode15s (stiff/NDF).In the Data Import pane, select the Time and Output check boxes.
Run the script. The simulation results when you use an Algebraic Constraint block are the same as for the model simulation using only differential equations.
Using an Algebraic Constraint block creates an algebraic loop in a model, If
you set the Algebraic Loop parameter to
warning (on the Modeling tab,
click Model Settings, then select
Diagnostics), you receive a warning in the Diagnostic
Viewer during simulation.
For this model, the algebraic loop solver was able to find a solution for the simulation, but algebraic loops don’t always have a solution, and they are not supported for code generation. For more information about algebraic loops in Simulink models and how to remove them, see Algebraic Loop Concepts.
References
[1] Robertson, H. H. “The solution of a set of reaction rate equations.” Numerical Analysis: An Introduction (J. Walsh ed.). London, England:Academic Press, 1966, pp. 178–182.