Anti-Windup Control Using PID Controller Block
This example shows how to use anti-windup schemes to prevent integration wind-up in PID controllers when the actuators are saturated. The PID Controller block in Simulink® features two built-in anti-windup methods, back-calculation and clamping, as well as a tracking mode to handle more complex industrial scenarios. The PID Controller block supports several features that allow it to handle controller windup issues under commonly encountered industrial scenarios.
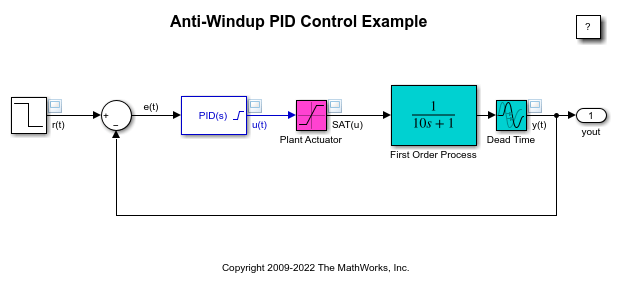
The plant to be controlled is a saturated first-order process with dead-time.
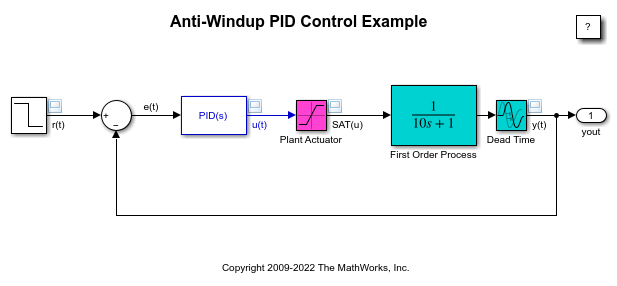
The PID Controller block has parameters tuned with the Simulink Control Design™ PID tuner with saturation ignored.
The controlled plant is a first-order process with dead-time described by
 .
.
The plant has known input saturation limits of [-10, 10], which are accounted for in the Saturation block labeled Plant Actuator. The PID Controller block in Simulink features two built-in anti-windup methods that allow it to account for the available information about the plant input saturation.
Performance Without Using Anti-Windup
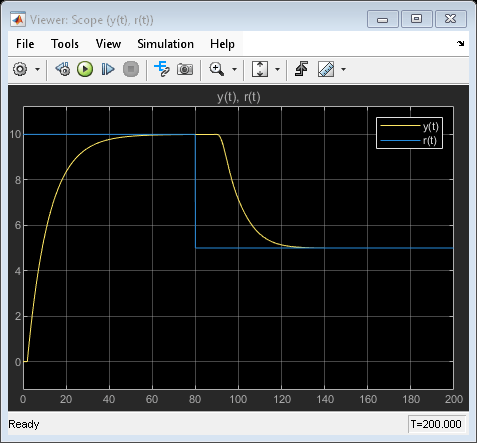
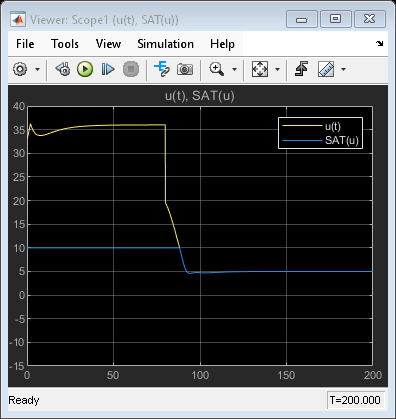
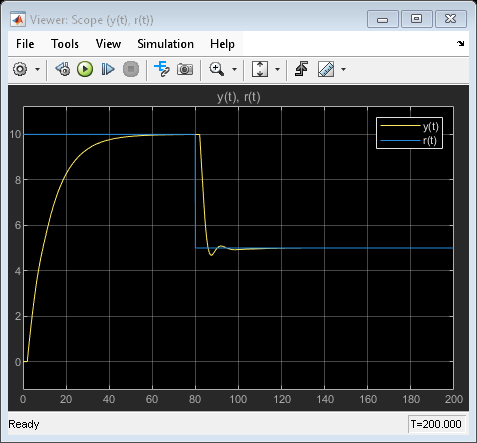
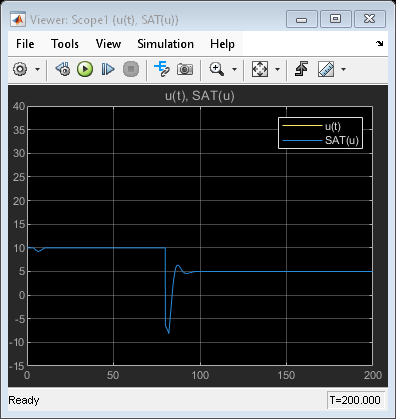
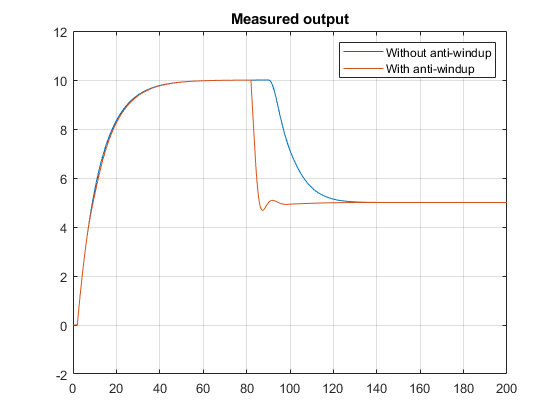
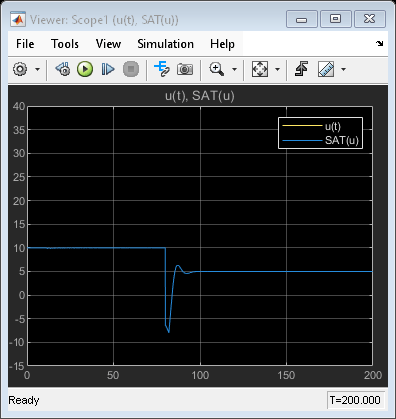
First, examine the effect of saturation on the closed-loop when the saturation model is not considered by the PID Controller block. Simulating the model generates these results. The figure shows the setpoint versus measured output with no anti-windup. The figure also shows the controller output and saturated input with no anti-windup.
These figures highlight two problems with controlling a system with input saturation:
When the setpoint value is
10, the PID control signal reaches a steady-state at about36.29, outside the range of the actuator. The controller is therefore operating in a nonlinear region where increasing the control signal has no effect on the system output, a condition known as winding up. Note that the DC-gain of the plant is unity. Therefore, the controller output does not need to have a steady-state value outside the range of the actuator.When the setpoint value becomes
5, there is a considerable delay before the PID controller output returns to within the actuator range.
Designing the PID controller to account for the effect of saturation improves its performance by allowing it to operate in the linear region most of the time and recover quickly from nonlinearity. You can use anti-windup mechanism to achieve this.
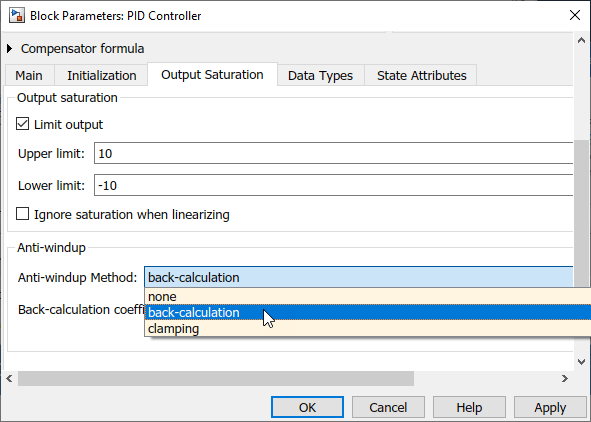
Configure Block for Anti-Windup Based on Back-Calculation
The back-calculation anti-windup method uses a feedback loop to unwind the PID Controller block internal integrator when the controller hits specified saturation limits and enters nonlinear operation. To enable anti-windup, go to the Output Saturation tab in the block dialog box. Select Limit output and enter the saturation limits for the plant. Next, from the Anti-windup method list, select back-calculation. Then, specify the Back-calculation coefficient (Kb). The inverse of this gain is the time constant of the anti-windup loop. In this example, the back-calculation gain is chosen to be 1. For more information on how to choose this value, see [1].
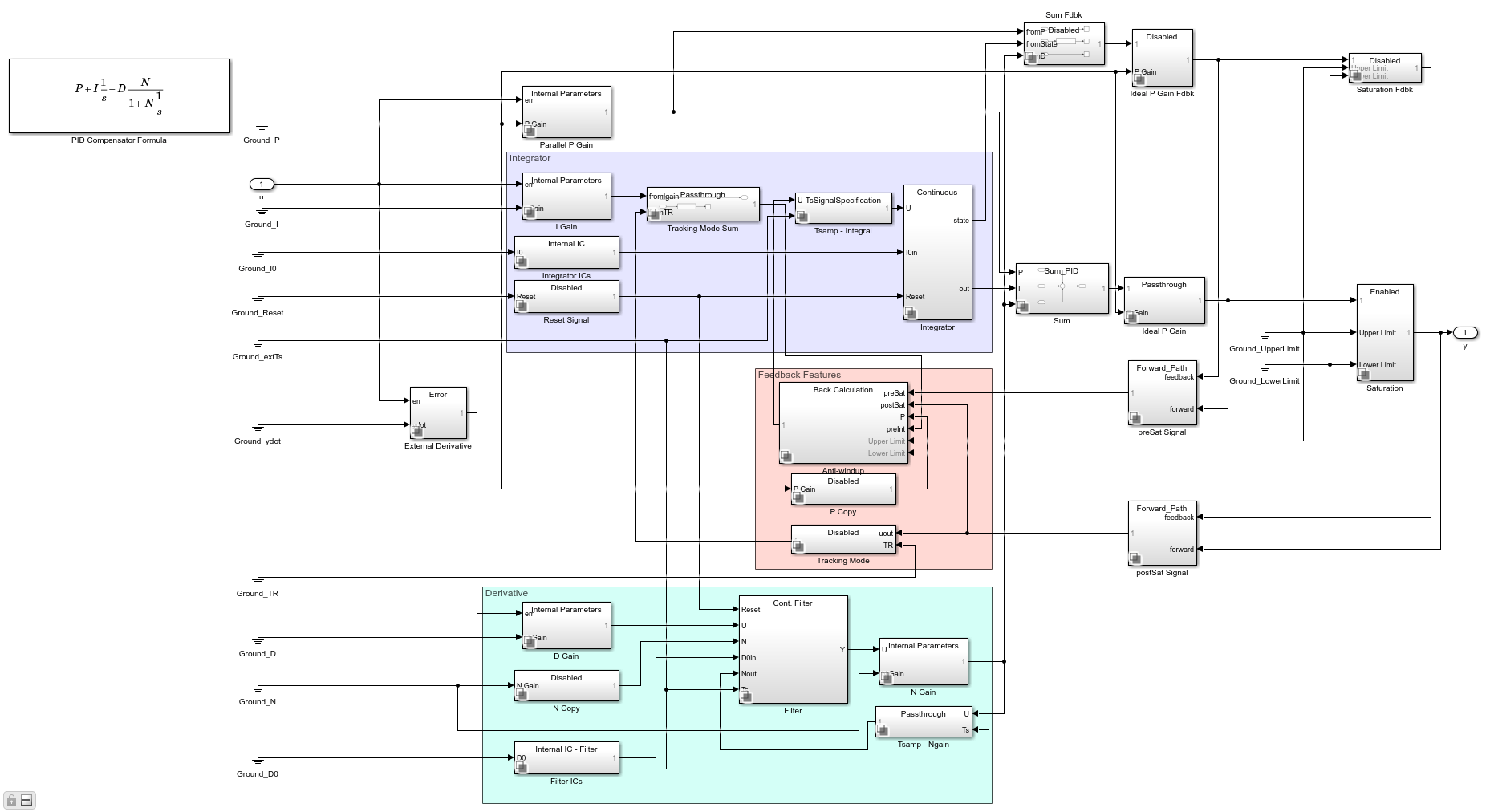
Once back-calculation is enabled, the block has an internal tracking loop that unwinds the Integrator output. This figure shows the under-mask view of the PID Controller block with back-calculation.
Note how quickly the PID control signal returns to the linear region and how fast the loop recovers from saturation. The controller output u(t) and the saturated input SAT(u) coincide with each other because Limit output is enabled.
To better visualize the effect of anti-windup, this figure illustrates the plant measured output y(t) with and without anti-windup.
Configure Block for Anti-Windup Based on Integrator Clamping
Another common anti-windup strategy is based on conditional integration. To enable anti-windup, in the Block Parameters dialog box, select the Saturation tab. Select Limit output and enter the saturation limits for the plant. Then, from the Anti-windup method list, select clamping.
This figure shows setpoint versus measured output with clamping. This figure also shows that the controller output u(t) and the saturated input SAT(u) coincide with each other because Limit output is enabled. For more information on when to use clamping, see [1].
Use Tracking Mode to Handle Complex Anti-Windup Scenarios
The anti-windup strategies discussed so far rely on built-in methods to process the saturation information provided to the block via its dialog box. For those built-in techniques to work as intended, two conditions must be met:
The saturation limits of the plant are known and can be entered into the dialog box of the block.
The PID Controller block output signal is the only signal feeding the actuator.
These conditions may be restrictive when handling general anti-windup scenarios. The PID Controller block features a tracking mode that allows you to set up a back-calculation anti-windup loop externally. The next two examples show the use of tracking mode for anti-windup purposes:
Anti-windup for saturated actuators with cascaded dynamics
Anti-windup for PID control with feedforward
Construct Anti-Windup Scheme for Saturated Actuators with Cascaded Dynamics
The actuator in sldemo_antiwindupactuator has complex dynamics. Complex dynamics are common when an actuator has its own closed-loop dynamics. The PID controller is in an outer loop and sees the actuator dynamics as an inner loop, which is also called cascaded saturated dynamics.
A successful anti-windup strategy requires feeding back the actuator output to the tracking port of the PID Controller block. To configure the tracking mode of the PID Controller block, in the block Parameters dialog box, click the Initialization tab. Select Enable tracking mode and specify the gain Kt. The inverse of this gain is the time constant of the tracking loop. For more information on how to choose this gain, see [1].
The measured output of the plant y(t) and the controller output u(t) respond almost immediately to changes in the setpoint. Without the anti-windup mechanism, these responses have long delays.
Anti-Windup Scheme for PID Control with Feedforward
In another common control configuration, the actuator receives a control signal that is a combination of a PID control signal and a feedforward control signal. Open the model sldemo_antiwindupfeedforward.
To accurately build a back-calculation anti-windup loop, the tracking signal should subtract the contribution of the feedforward signal. This action allows the PID Controller block to know its share of the effective control signal applied to the actuator.
The feedforward gain is unity here because the plant has a DC-gain of 1.
The measured output of the plant y(t) and the controller output u(t) respond almost immediately to changes in the setpoint. When the setpoint value is 10, note how the controller output u(t) reduces to be within the range of the actuator. When the setpoint value is 10, note how the controller output u(t) reduces to be within the range of the actuator. This figure shows the PID Controller output and feed forward input with anti-windup.

References
[1] Åström, Karl J., and Tore Hägglund. Advanced PID Control. Triangle Park, NC: International Society of Automation, 2006.