prony
Prony method for filter design
Description
Examples
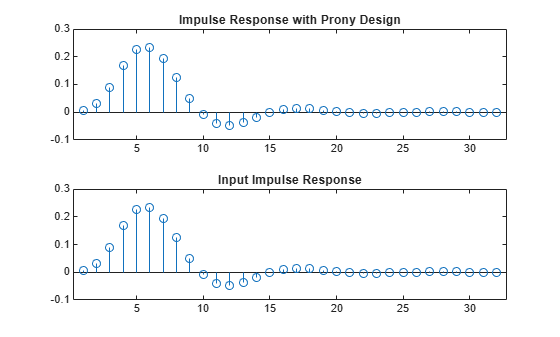
Fit a 4th-order IIR model to the impulse response of a lowpass filter. Plot the original and Prony-designed impulse responses.
d = designfilt('lowpassiir','NumeratorOrder',4,'DenominatorOrder',4, ... 'HalfPowerFrequency',0.2,'DesignMethod','butter'); h = filter(d,[1 zeros(1,31)]); bord = 4; aord = 4; [b,a] = prony(h,bord,aord); subplot(2,1,1) stem(impz(b,a,length(h))) title 'Impulse Response with Prony Design' subplot(2,1,2) stem(h) title 'Input Impulse Response'
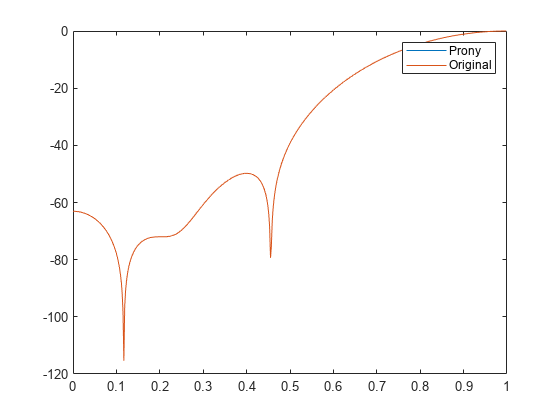
Fit a 10th-order FIR model to the impulse response of a highpass filter. Plot the original and Prony-designed frequency responses. The responses match to high precision.
d = designfilt('highpassfir','FilterOrder',10,'CutoffFrequency',0.8); h = filter(d,[1 zeros(1,31)]); bord = 10; aord = 0; [b,a] = prony(h,bord,aord); [hp,f] = freqz(b,a); [hd,fd] = freqz(d); figure plot(f/pi,mag2db(abs(hp)),fd/pi,mag2db(abs(hd))) legend('Prony','Original')
Input Arguments
Output Arguments
More About
References
[1] Parks, Thomas W., and C. Sidney Burrus. Digital Filter Design. New York, NY, USA: Wiley-Interscience, 1987.
Extended Capabilities
Version History
Introduced before R2006a