gaussdesign
Gaussian FIR pulse-shaping filter design
Description
Examples
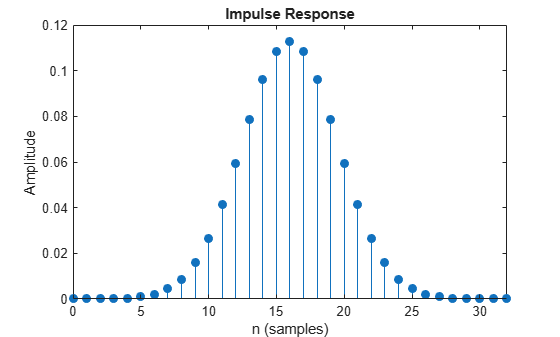
Specify that the modulation used to transmit the bits is a Gaussian minimum-shift keying (GMSK) pulse. This pulse has a 3 dB bandwidth equal to 0.3 of the bit rate. Truncate the filter to 4 symbols and represent each symbol with 8 samples.
bt = 0.3; span = 4; sps = 8; h = gaussdesign(bt,span,sps); impz(h)
Input Arguments
Output Arguments
Algorithms
The impulse response of the Gaussian filter is given by
where
BT is the bandwidth-symbol time product specified in
bt, where B is the 3 dB bandwidth of the
filter and T is the symbol time. The number of symbols between the
start and end of the impulse (span) and the number of samples per
symbol (sps) determine the length of the impulse response:
For more information, see FIR Gaussian Pulse-Shaping Filter Design.
References
[1] Krishnapura, N., S. Pavan, C. Mathiazhagan, and B. Ramamurthi. “A baseband pulse shaping filter for Gaussian minimum shift keying.” Proceedings of the 1998 IEEE International Symposium on Circuits and Systems. Vol. 1, 1998, pp. 249–252.
[2] Rappaport, Theodore S. Wireless Communications: Principles and Practice. 2nd Ed. Upper Saddle River, NJ: Prentice Hall, 2002.
Extended Capabilities
Version History
Introduced in R2013b