ROS 2 Node Generation and Deployment
ROS Toolbox enables you to generate C++ and CUDA® code for ROS 2 nodes, and deploy them to local or remote device targets. For MATLAB® code that contains ROS 2 interfaces, you can generate C++ code and deploy them as ROS 2 nodes using MATLAB Coder™. For Simulink® models, you can generate C++ code using Simulink Coder. You can also generate optimized CUDA code using GPU Coder™, and deploy them as ROS 2 nodes.
This table illustrates the type of ROS 2 nodes you can generate and deploy from MATLAB and Simulink with a reference example for each supported workflow:
| ROS 2 Node Type | Deployment from MATLAB | Deployment from Simulink |
|---|---|---|
| Standard Node | Generate Standalone ROS 2 Node from MATLAB Function | Generate Standalone ROS 2 Node from Simulink |
| Component Node | Not Supported | Generate a ROS 2 Component Node from Simulink |
ros2_Control Plugin | Not Supported | Generate ros2_control Plugin from Simulink |
CUDA optimized Node | Generate CUDA ROS and CUDA ROS 2 Nodes Using MATLAB Coder and GPU Coder | Generate CUDA ROS 2 Node from Simulink |
For more information about generating and deploying the different types of ROS 2 nodes, see the categories below.
Note
Deployment of ROS 2 nodes requires transfer of files to the target ROS 2 device through an SSH connection. Ensure that OpenSSH is installed on the target ROS 2 device before deployment.
Categories
- ROS 2 Standard Node Generation and Deployment
Generate C/C++ and CUDA code for ROS 2 standard nodes and deploy to local and remote hardware
- ROS 2 Component Node Generation and Deployment
Generate C/C++ and CUDA code for ROS 2 component nodes and deploy to local and remote hardware
- ROS 2 Control Plugin Generation and Deployment
Generate C/C++ and CUDA code for ros2_control plugin, and deploy to local and remote hardware
Featured Examples
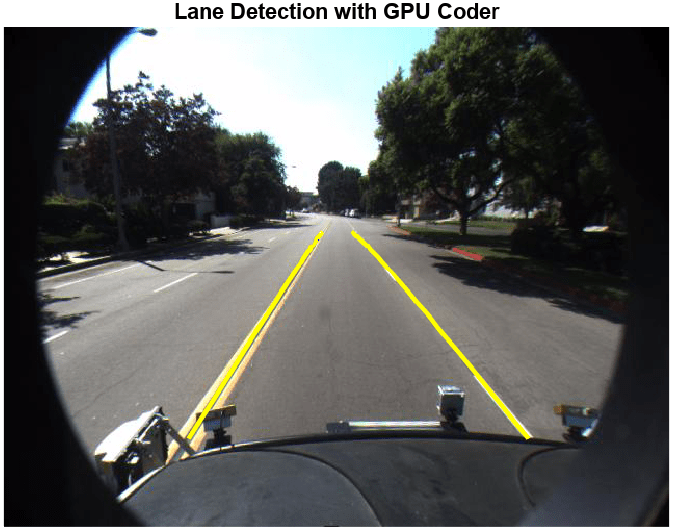
Lane Detection in ROS 2 Using Deep Learning with MATLAB
Generate CUDA optimized ROS 2 node for deep learning based lane detection algorithm.
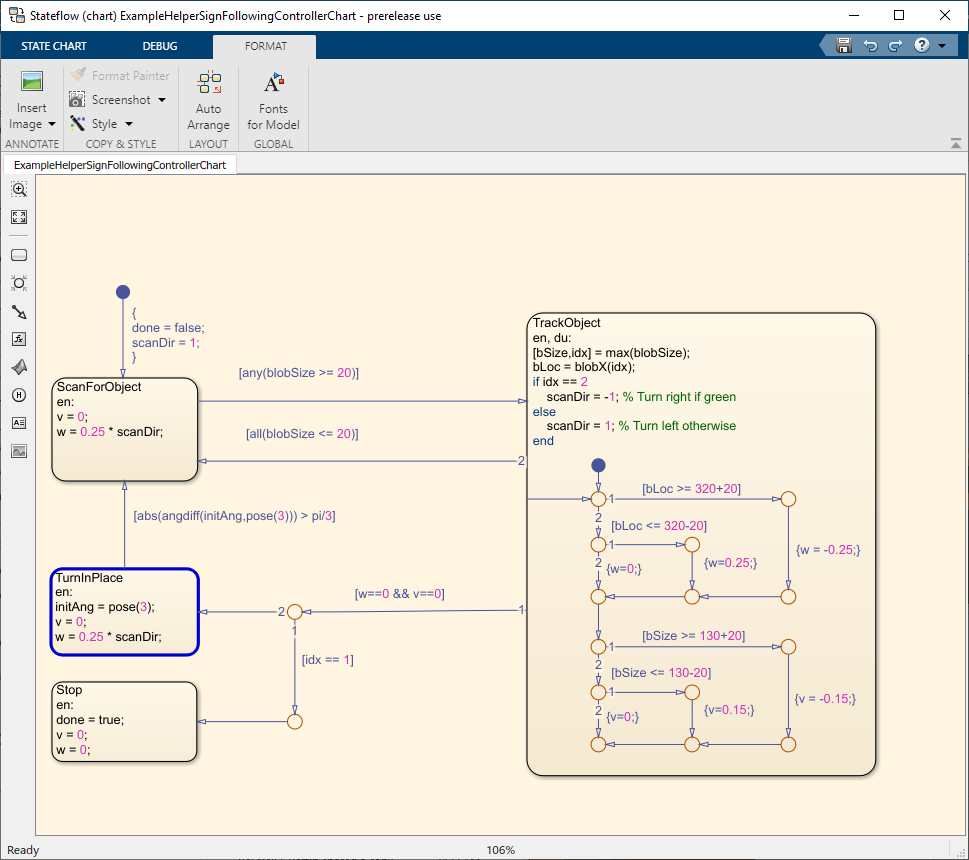
Sign-Following Robot with ROS 2 in MATLAB
Control a simulated robot running on a separate ROS-based simulator over ROS 2 network in MATLAB and generate a ROS 2 node for the control algorithm to deploy it to a remote device.
Generate and Deploy ROS 2 Component Nodes for Sign Following Robot Using Simulink
Generate ROS 2 component nodes from Simulink® for handling perception and tracking logic of a sign-following robot. It also shows how to load and run the generated ROS 2 components in a docker container running the simulated robot in Gazebo.

Generate and Deploy ROS 2 Nodes for Automated Parking Valet in Simulink
After simulating the ROS 2 nodes to verify all the components of the automated parking valet system as described in Simulate Automated Parking Valet with ROS 2 in Simulink, you can now generate code for those ROS 2 nodes and deploy them. Variant subsystem under each node will use publish and subscribe blocks to replace input and output ports.
Automated Generation and Deployment of ros2_control Plugin for Trajectory Controller
Generate a ros2_control plugin for a trajectory controller model designed in Simulink® and integrate it into an existing ROS 2 project. This example adds ROS 2 Control interfaces to the UR5e manipulator trajectory controller model designed in the previous step, Design Trajectory Controller for UR5e through Simulink and Unreal Engine Co-Simulation, and generates the ros2_control plugin.

Generate CUDA ROS and CUDA ROS 2 Nodes Using MATLAB Coder and GPU Coder
Generate and build CUDA ROS and CUDA ROS 2 nodes from a MATLAB function.