Generate Minimum Jerk Trajectory
This example shows how to generate a minimum jerk trajectory using the Minimum Jerk Polynomial Trajectory block.
Example Model
Open the model.
open_system("minjerk_traj_ex1.slx")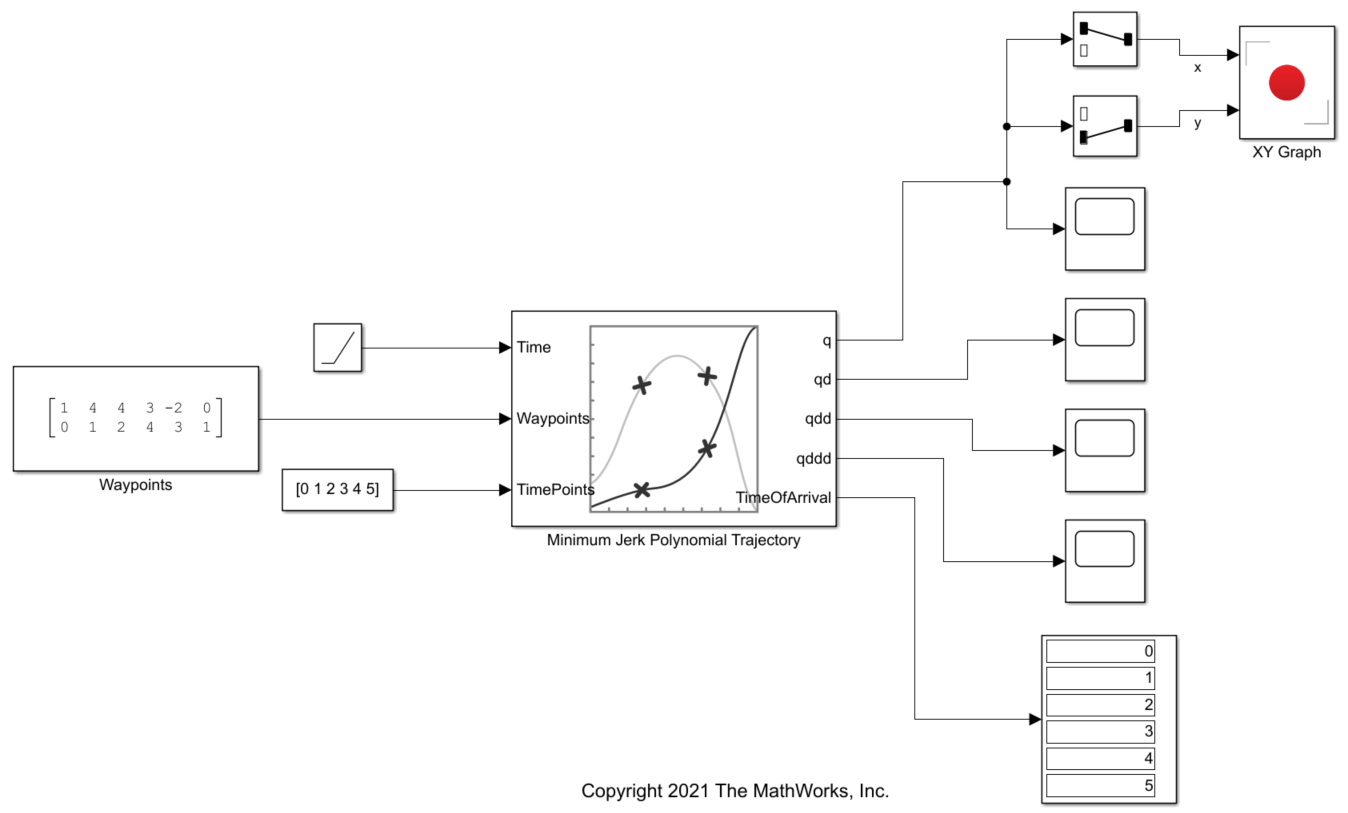
The model contains a Constant block, Waypoints, that specifies six two-dimensional waypoints to the Waypoints port of the Minimum Jerk Polynomial Trajectory block, and another Constant block specifies time points for each of those waypoints to the TimePoints port. The input to the Time port is a ramp signal, to simulate time progressing.
Simulate and Display Results
Run the simulation. Scope blocks visualize the q port output of positions, the qd port output of velocities, the qdd port output of accelerations, and the qddd port output of jerks of the trajectory.
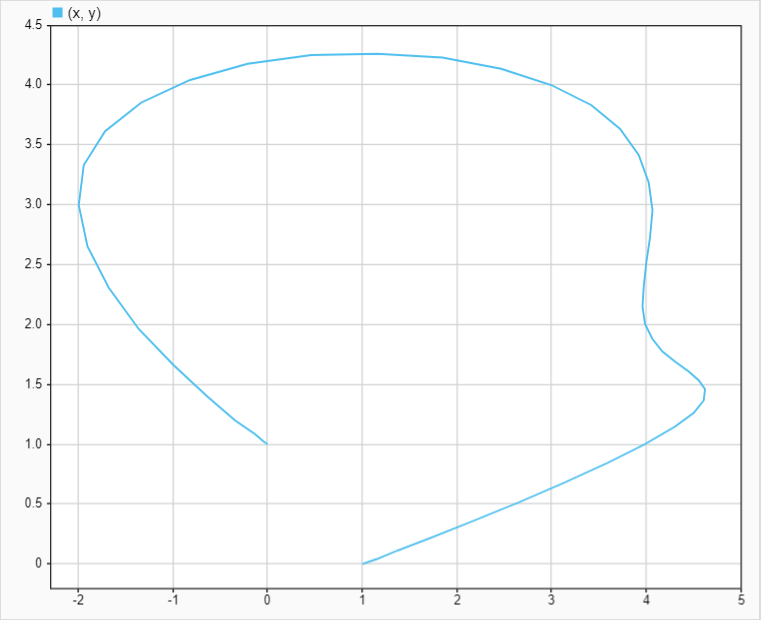
The XY Graph shows the actual 2-D trajectory, which stays inside the defined control points, and reaches the first and last waypoints.
Positions

Velocities

Accelerations
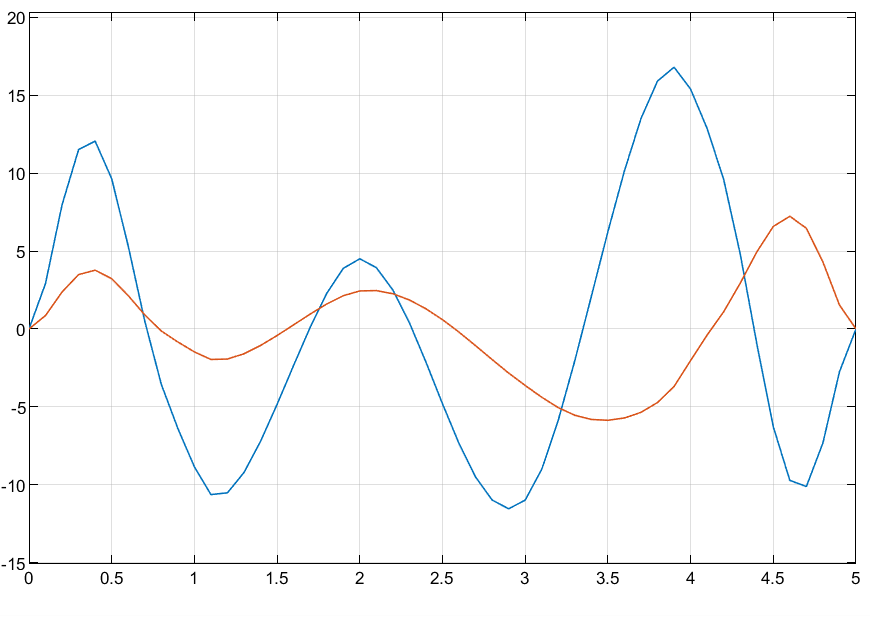
Jerks

x- and y**-positions**