Transform Trajectory
Generate trajectory between two homogeneous transforms
Libraries:
Robotics System Toolbox /
Utilities
Description
The Transform Trajectory block generates an interpolated trajectory between two homogenous transformation matrices. The block outputs the transform at the times given by the Time input, which can be a scalar or vector.
The trajectory is computed using quaternion spherical linear interpolation (SLERP) for the rotation and linear interpolation for the translation. This method finds the shortest path between positions and rotations of the transformation. Select the Use custom time scaling check box to compute the trajectory using a custom time scaling. The block uses linear time scaling by default.
The initial and final values are held constant outside the time period defined in Time interval.
Examples
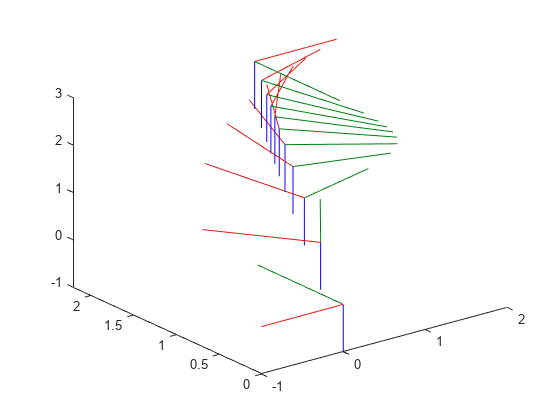
Use Custom Time Scaling for Transform Trajectory
Implement custom time scaling in Transform Trajectory to achieve nonlinear movement between transforms.
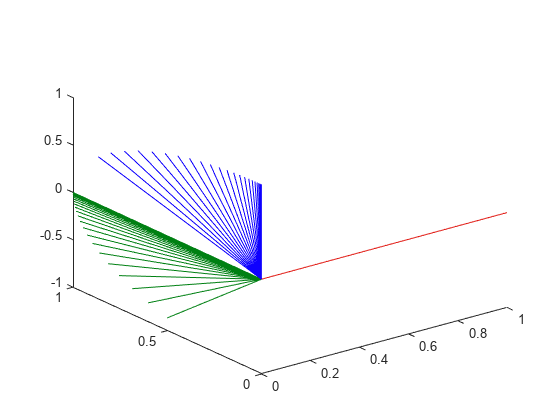
Use Custom Time Scaling for a Rotation Trajectory
Specify custom time-scaling in the Rotation Trajectory block in Simulink® to execute an interpolated trajectory.
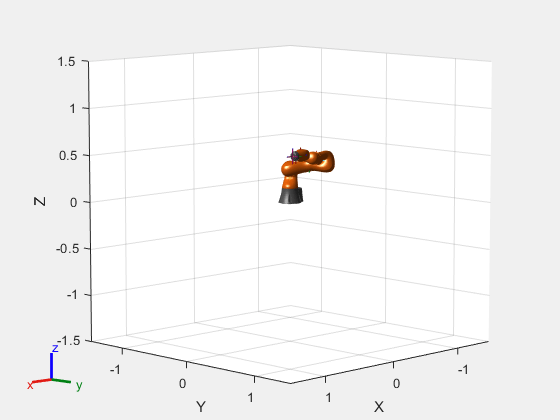
Execute Transformation Trajectory Using Manipulator and Inverse Kinematics
Generate a transformation trajectory using the Transform Trajectory block and execute it for a manipulator robot using inverse kinematics.
Ports
Input
Output
Parameters
Tips
For better performance, consider these options:
Minimize the number of waypoint or parameter changes.
Set the Waypoint source parameter to
Internal.Set the Simulate using parameter to
Code generation. For more information, see Interpreted Execution vs. Code Generation (Simulink).
References
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. Cambridge University Press, 2017.
Extended Capabilities
Version History
Introduced in R2019a