blindrangemap
Syntax
Description
Examples
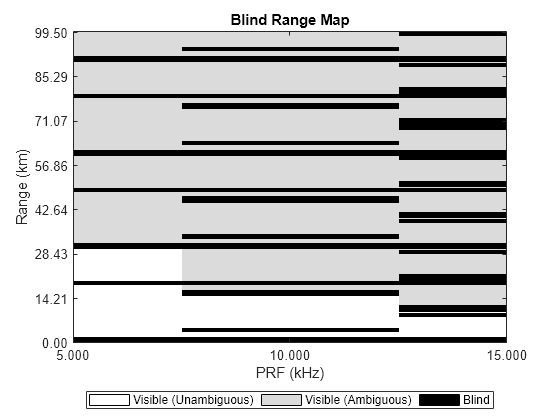
Start with a radar transmitting long pulses. The radar covers the range from km. Create a blind range map when the pulse repetition frequencies are 5000, 10000, and 15000 kHz. Ranges from 18.5 km to 19.8 km and from 30 km to 32 km are obstructed due to clutter.
R = linspace(0,100e3,1000);
Choose the three PRFs at 5000, 10000, and 15000 kHz.
PRF = [5e3,10e3,15e3];
Compute the minimum range of the radar from the pulse duration.
tau = 5e-6;
rmin = time2range(tau,physconst('LightSpeed'));Add two clutter obstruction regions and create the blind range map.
obs = [18.5e3 19.8e3;30e3 32e3]; blindrangemap(R,PRF,rmin,obs)
A pulse radar transmits at two pulse repetition frequencies (PRF): 10.151 kHz and 14.163 kHz. Set the minimum detectable range of the radar to 1000 m. Sidelobe clutter extends from 34.5 km to 36.5 km when transmitting at the first PRF, and from 36.3 km to 39.8 km when transmitting at the second PRF. Display the blind range map for ranges between 0 and 100 km at 1 km increments.
R = linspace(0,100e3,1000);
Set the minimum detectable range to 1000 m.
Rmin = 1000;
Set the two PRF values.
PRF = [10151 14163];
Account for blind ranges due to sidelobe clutter using the range mask input argument. First, initialize the map to indicate that all ranges are visible.
rangeMask = false(numel(R),numel(PRF));
Then, mask the sidelobe clutter at PRF = 10.151 kHz.
rangeMask(R > 34500 & R < 36500,1) = true;
Mask the sidelobe clutter at PRF =14.163 kHz.
rangeMask(R > 36300 & R < 39800,2) = true;
Display the blind range map.
blindrangemap(R,PRF,Rmin,'RangeMask',rangeMask)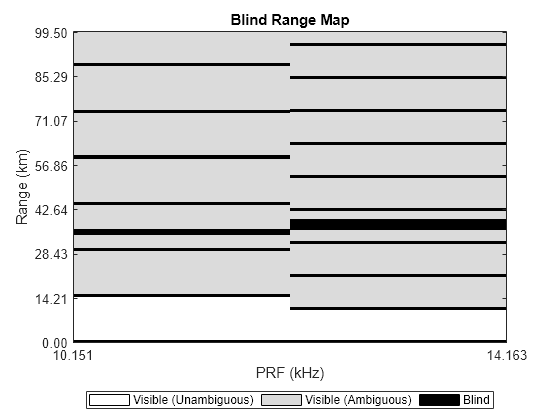
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2023a