musicdoa
Estimate arrival directions of signals using MUSIC
Syntax
Description
doas = musicdoa(covmat,nsig)doas, of nsig plane
waves received on a uniform linear array (ULA). The argument covmat is
a positive-definite Hermitian matrix representing the sensor covariance
matrix. Detected sources appear as peaks in the spatial spectrum.
The argument nsig is the number of arriving signals.
Sensor elements are spaced one-half wavelength apart in units of wavelengths.
The function forces exact conjugate symmetry of covmat by
averaging the covariance matrix with its conjugate transpose.
Examples
Calculate the directions of arrival of 3 uncorrelated signals arriving at an 11-element ULA with half-wavelength spacing. Assume the signals are coming from the broadside angles of 0°, –12°, and 85°. The noise at each element is Gaussian white noise and is uncorrelated between elements. The SNR is 5 dB.
Specify the number of ULA elements and the element spacing (in wavelengths).
nelem = 11; d = 0.5; snr = 5.0; elementPos = (0:nelem-1)*d;
Specify the number of signals and their broadside arrival angles.
nsig = 3; angles = [0.0 -12.0 85.0];
Create the sensor covariance matrix.
covmat = sensorcov(elementPos,angles,db2pow(-snr));
Estimate the broadside arrival angles.
doas = musicdoa(covmat,nsig)
doas = 1×3
0 85 -12
The estimated angles match the specified angles.
Calculate the directions of arrival of 3 uncorrelated signals arriving at an 11-element ULA with half-wavelength spacing. Assume the signals are coming from the broadside angles of 0°, –12°, and 85°. The noise at each element is Gaussian white noise and is uncorrelated between elements. The SNR is 2 dB.
Specify the number of ULA elements and the element spacing (in wavelengths).
nelem = 11; d = 0.5; snr = 2.0; elementPos = (0:nelem-1)*d;
Specify the number of signals and their broadside arrival angles.
nsig = 3; angles = [0.0 -12.0 85.0];
Create the sensor covariance matrix.
covmat = sensorcov(elementPos,angles,db2pow(-snr));
Compute the MUSIC spectrum and estimate the broadside arrival angles.
[doas,spec,specang] = musicdoa(covmat,nsig);
Plot the MUSIC spectrum.
plot(specang,10*log10(spec)) xlabel('Arrival Angle (deg)') ylabel('Magnitude (dB)') title('MUSIC Spectrum') grid
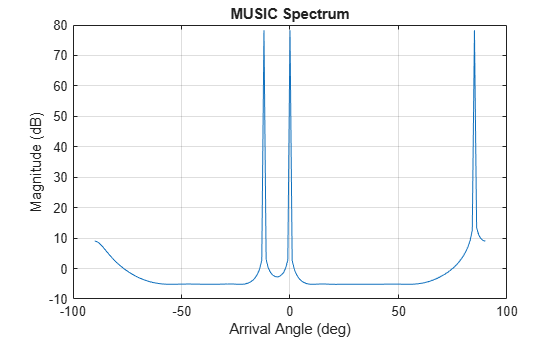
The estimated angles match the specified angles.
Calculate the directions of arrival of 4 uncorrelated signals arriving at an 11-element ULA. The element spacing is 0.5 wavelengths. Assume the signals are coming from the broadside angles of –60.2°, –20.7°, 0.5°, and 84.8°. The noise at each element is Gaussian white noise and is uncorrelated between elements. The SNR is 0 dB.
Specify the number of ULA elements and the element spacing (in wavelengths).
nelem = 11; d = 0.5; snr = 5.0; elementPos = (0:nelem-1)*d;
Specify the number of signals and their broadside arrival angles.
nsig = 4; angles = [-60.2 -20.7 0.5 84.8];
Create the sensor covariance matrix.
covmat = sensorcov(elementPos,angles,db2pow(-snr));
Compute the MUSIC spectrum and estimate the broadside arrival angles in the range from -70° to 90° in 0.1° increments.
[doas,spec,specang] = musicdoa(covmat,nsig,'ScanAngles',[-70:.1:90]);Plot the MUSIC spectrum.
plot(specang,10*log10(spec)) xlabel('Arrival Angle (deg)') ylabel('Magnitude (dB)') title('MUSIC Spectrum') grid
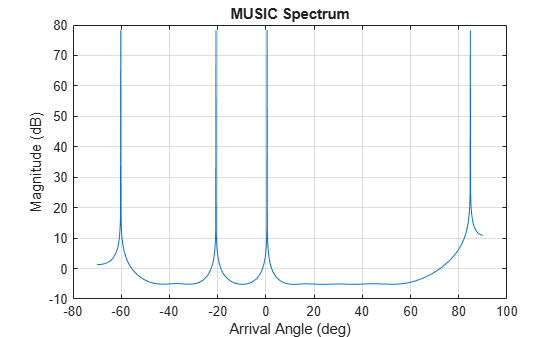
disp(doas)
84.8000 -60.2000 0.5000 -20.7000
The estimated angles match the specified angles.
Calculate the directions of arrival of 4 uncorrelated signals arriving at an 11-element ULA. The element spacing is 0.4 wavelengths spacing. Assume the signals are coming from the broadside angles of –60°, –20°, 0°, and 85°. The noise at each element is Gaussian white noise and is uncorrelated between elements. The SNR is 0 dB.
Specify the number of ULA elements and the element spacing (in wavelengths).
nelem = 11; d = 0.4; snr = 0.0; elementPos = (0:nelem-1)*d;
Specify the number of signals and their broadside arrival angles.
nsig = 4; angles = [-60.0 -20.0 0.0 85.0];
Create the sensor covariance matrix.
covmat = sensorcov(elementPos,angles,db2pow(-snr));
Compute the MUSIC spectrum and estimate the broadside arrival angles.
[doas,spec,specang] = musicdoa(covmat,nsig,'ElementSpacing',d);Plot the MUSIC spectrum.
plot(specang,10*log10(spec)) xlabel('Arrival Angle (deg)') ylabel('Magnitude (dB)') title('MUSIC Spectrum') grid
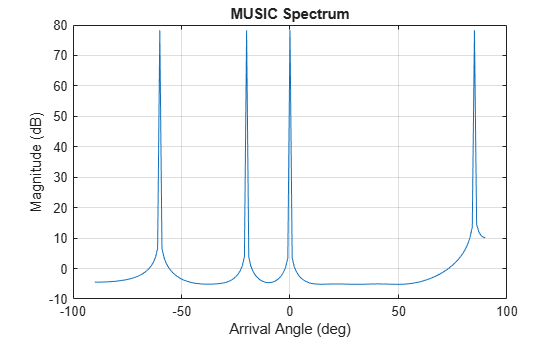
The estimated angles match the specified angles.
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2016b