evaluateCGradient
Evaluate flux of PDE solution
Syntax
Description
[___] = evaluateCGradient(
returns the flux of PDE solution for the stationary equation at the 2-D or 3-D
points specified in results,querypoints)querypoints.
[___] = evaluateCGradient(___,
returns the flux of the solution of the PDE system for equation indices
(components) iU)iU. When evaluating flux for a system of PDEs,
specify iU after the input arguments in any of the previous
syntaxes.
The first dimension of cgradx,
cgrady, and, in the 3-D case,
cgradz corresponds to query points. The second
dimension corresponds to equation indices iU.
[___] = evaluateCGradient(___,
returns the flux of PDE solution for the time-dependent equation or system of
time-dependent equations at times iT)iT. When evaluating flux
for a time-dependent PDE, specify iT after the input
arguments in any of the previous syntaxes. For a system of time-dependent PDEs,
specify both equation indices (components) iU and time
indices iT.
The first dimension of cgradx,
cgrady, and, in the 3-D case,
cgradz corresponds to query points. For a single
time-dependent PDE, the second dimension corresponds to time-steps
iT. For a system of time-dependent PDEs, the second
dimension corresponds to equation indices iU, and the third
dimension corresponds to time-steps iT.
[
returns the flux of PDE solution of a 2-D problem at the nodal points of the
triangular mesh. The shape of output arrays, cgradx,cgrady]
= evaluateCGradient(results)cgradx and
cgrady, depends on the number of PDEs for which
results is the solution. The first dimension of
cgradx and cgrady represents the
node indices. For a system of stationary or time-dependent PDEs, the second
dimension represents equation indices. For a single time-dependent PDE, the
second dimension represents time-steps. The third dimension represents time-step
indices for a system of time-dependent PDEs.
[
returns the flux of PDE solution of a 3-D problem at the nodal points of the
tetrahedral mesh. The first dimension of cgradx,cgrady,cgradz]
= evaluateCGradient(results)cgradx,
cgrady, and cgradz represents the
node indices. The second dimension represents the equation indices. For a system
of stationary or time-dependent PDEs, the second dimension represents equation
indices. For a single time-dependent PDE, the second dimension represents
time-steps. The third dimension represents time-step indices for a system of
time-dependent PDEs.
Examples
Solve the problem on the L-shaped membrane with zero Dirichlet boundary conditions. Evaluate the tensor product of c-coefficient and gradients of the solution to a scalar elliptic problem at nodal and arbitrary locations. Plot the results.
Create a PDE model and geometry for this problem.
model = createpde; geometryFromEdges(model,@lshapeg); pdegplot(model,"FaceLabels","on")

Specify boundary conditions and coefficients.
applyBoundaryCondition(model,"dirichlet", ... "Edge",1:model.Geometry.NumEdges, ... "u",0); specifyCoefficients(model,"m",0,"d",0,"c",10, ... "a",0,"f",1,"Face",1); specifyCoefficients(model,"m",0,"d",0,"c",5, ... "a",0,"f",1,"Face",2); specifyCoefficients(model,"m",0,"d",0,"c",1, ... "a",0,"f",1,"Face",3);
Mesh the geometry and solve the problem.
generateMesh(model,"Hmax",0.05);
results = solvepde(model);
u = results.NodalSolution;Compute the flux of the solution and plot the results.
[cgradx,cgrady] = evaluateCGradient(results); figure pdeplot(model,"XYData",u,"Contour","on","FlowData",[cgradx,cgrady]) axis equal

Compute the flux of the solution on the grid from -1 to 1 in each direction using the query points matrix.
v = linspace(-1,1,37); [X,Y] = meshgrid(v); querypoints = [X(:),Y(:)]'; [cgradxq,cgradyq] = evaluateCGradient(results,querypoints);
Alternatively, you can specify the query points as X,Y instead of specifying them as a matrix.
[cgradxq,cgradyq] = evaluateCGradient(results,X,Y);
Plot the result using the quiver plotting function.
figure quiver(X(:),Y(:),cgradxq,cgradyq) xlabel("x") ylabel("y") axis equal

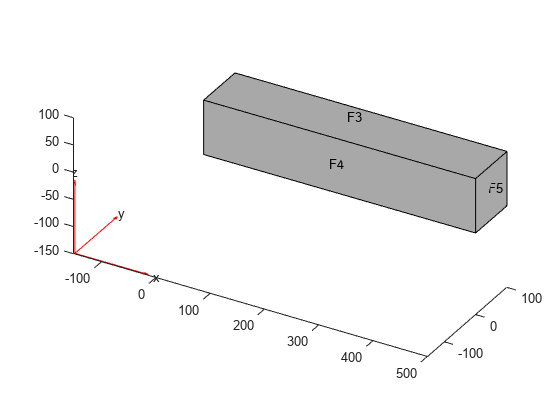
Compute stresses in a cantilever beam subject to shear loading at free end.
Create a PDE model and geometry for this problem.
N = 3; model = createpde(N); importGeometry(model,"SquareBeam.stl"); pdegplot(model,"FaceLabels","on")
Specify coefficients and apply boundary conditions.
E = 2.1e11; nu = 0.3; c = elasticityC3D(E, nu); a = 0; f = [0;0;0]; specifyCoefficients(model,"m",0,"d",0,"c",c, ... "a",a,"f",f); applyBoundaryCondition(model,"dirichlet", ... "Face",6, ... "u",[0 0 0]); applyBoundaryCondition(model,"neumann", ... "Face",5, ... "g",[0,0,-3e3]);
Mesh the geometry and solve the problem.
generateMesh(model,"Hmax",25,"GeometricOrder","quadratic"); results = solvepde(model);
Compute stress, that is, the product of c-coefficient and gradients of displacement.
[sig_xx,sig_yy,sig_zz] = evaluateCGradient(results);
Plot normal component of stress along x-direction. The top portion of the beam experiences tension, and the bottom portion experiences compression.
figure
pdeplot3D(model,"ColorMapData",sig_xx(:,1))
Define a line across the beam from the bottom to the top at mid-span and mid-width. Compute stresses along the line.
zg = linspace(0, 100, 10);
xg = 250*ones(size(zg));
yg = 50*ones(size(zg));
[sig_xx,sig_xy,sig_xz] = ...
evaluateCGradient(results,xg,yg,zg,1);Plot the normal stress along x-direction.
figure plot(sig_xx,zg) grid on xlabel("\sigma_{xx}") ylabel("z")

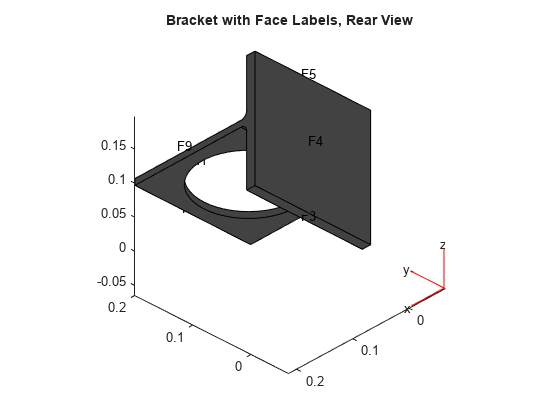
Compute stresses in an idealized 3-D mechanical part under an applied load. First, create a PDE model for this problem.
N = 3; model = createpde(N);
Import the geometry and plot it.
importGeometry(model,"BracketWithHole.stl"); figure pdegplot(model,"FaceLabels","on") view(30,30) title("Bracket with Face Labels")

figure pdegplot(model,"FaceLabels","on") view(-134,-32) title("Bracket with Face Labels, Rear View")
Specify coefficients and apply boundary conditions.
E = 200e9; % elastic modulus of steel in Pascals nu = 0.3; % Poisson's ratio c = elasticityC3D(E,nu); a = 0; f = [0;0;0]; % Assume all body forces are zero specifyCoefficients(model,"m",0,"d",0,"c",c,"a",a,"f",f); applyBoundaryCondition(model,"dirichlet","Face",4,"u",[0,0,0]); distributedLoad = 1e4; % Applied load in Pascals applyBoundaryCondition(model,"neumann","Face",8, ... "g",[0,0,-distributedLoad]);
Mesh the geometry and solve the problem.
% Thickness of horizontal plate with hole, meters bracketThickness = 1e-2; % Maximum element length for a moderately fine mesh hmax = bracketThickness; generateMesh(model,"Hmax",hmax, ... "GeometricOrder","quadratic"); result = solvepde(model);
Create a grid. For this grid, compute the stress tensor, which is the product of c-coefficient and gradients of displacement.
v = linspace(0,0.2,21); [xq,yq,zq] = meshgrid(v); [cgradx,cgrady,cgradz] = evaluateCGradient(result);
Extract individual components of stresses.
sxx = cgradx(:,1); sxy = cgradx(:,2); sxz = cgradx(:,3); syx = cgrady(:,1); syy = cgrady(:,2); syz = cgrady(:,3); szx = cgradz(:,1); szy = cgradz(:,2); szz = cgradz(:,3);
Compute von Mises stress.
sVonMises = sqrt( 0.5*( (sxx-syy).^2 + (syy -szz).^2 +...
(szz-sxx).^2) + 3*(sxy.^2 + syz.^2 + szx.^2));Plot von Mises stress. The maximum stress occurs at the weakest section. This section has the least material to support the applied load.
pdeplot3D(model,"ColorMapData",sVonMises)
Solve a 2-D transient heat transfer problem on a square domain and compute heat flow across convective boundary.
Create a PDE model for this problem.
model = createpde;
Create the geometry.
g = @squareg; geometryFromEdges(model,g); pdegplot(model,"EdgeLabels","on") xlim([-1.2,1.2]) ylim([-1.2,1.2]) axis equal

Specify material properties and ambient conditions.
rho = 7800; cp = 500; k = 100; Text = 25; hext = 5000;
Specify the coefficients. Apply insulated boundary conditions on three edges and the free convection boundary condition on the right edge.
specifyCoefficients(model,"m",0,"d",rho*cp,"c",k,"a",0,"f",0); applyBoundaryCondition(model,"neumann", ... "Edge",[1,3,4], ... "q",0,"g",0); applyBoundaryCondition(model,"neumann", ... "Edge", 2, ... "q",hext,"g",Text*hext);
Set the initial conditions: uniform room temperature across domain and higher temperature on the left edge.
setInitialConditions(model,25);
setInitialConditions(model,100,"Edge",4);Generate a mesh and solve the problem using 0:1000:200000 as a vector of times.
generateMesh(model); tlist = 0:1000:200000; results = solvepde(model,tlist);
Define a line at convection boundary to compute heat flux across it.
yg = -1:0.1:1; xg = ones(size(yg));
Evaluate the product of c coefficient and spatial gradients at (xg,yg).
[qx,qy] = evaluateCGradient(results,xg,yg,1:length(tlist));
Spatially integrate gradients to obtain heat flow for each time-step.
HeatFlowX(1:length(tlist)) = -trapz(yg,qx(:,1:length(tlist)));
Plot convective heat flow over time.
figure plot(tlist,HeatFlowX) title("Heat flow across convection boundary") xlabel("Time") ylabel("Heat flow")

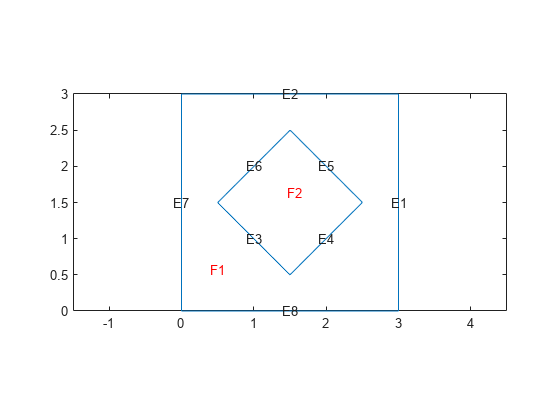
Solve the heat transfer problem for the following 2-D geometry consisting of a square and a diamond made of different materials. Compute the heat flux density and plot it as a vector field.
Create a PDE model for this problem.
numberOfPDE = 1; model = createpde(numberOfPDE);
Create a geometry that consists of a square with an embedded diamond.
SQ1 = [3; 4; 0; 3; 3; 0; 0; 0; 3; 3]; D1 = [2; 4; 0.5; 1.5; 2.5; 1.5; 1.5; 0.5; 1.5; 2.5]; gd = [SQ1,D1]; sf = 'SQ1+D1'; ns = char('SQ1','D1'); ns = ns'; dl = decsg(gd,sf,ns); geometryFromEdges(model,dl); pdegplot(model,"EdgeLabels","on","FaceLabels","on") xlim([-1.5,4.5]) ylim([-0.5,3.5]) axis equal
Set parameters for the square region.
rho_sq = 2; C_sq = 0.1; k_sq = 10; Q_sq = 0; h_sq = 0;
Set parameters for the diamond region.
rho_d = 1; C_d = 0.1; k_d = 2; Q_d = 4; h_d = 0;
Specify the coefficients for both subdomains. Apply the boundary and initial conditions.
specifyCoefficients(model,"m",0,"d",rho_sq*C_sq, ... "c",k_sq,"a",h_sq, ... "f",Q_sq,"Face",1); specifyCoefficients(model,"m",0,"d",rho_d*C_d, ... "c",k_d,"a",h_d, ... "f",Q_d,"Face",2); applyBoundaryCondition(model,"dirichlet", ... "Edge",1:4, ... "h",1,"r",0); setInitialConditions(model,0);
Mesh the geometry and solve the problem. To capture the most dynamic part of heat distribution process, solve the problem using logspace(-2,-1,10) as a vector of times.
generateMesh(model); tlist = logspace(-2,-1,10); results = solvepde(model,tlist); u = results.NodalSolution;
Compute the heat flux density. Plot the solution with isothermal lines using a contour plot, and plot the heat flux vector field using arrows. The direction of the heat flow (from higher to lower temperatures) is opposite to the direction of . Therefore, use -cgradx and -cgrady to show the heat flow.
[cgradx,cgrady] = evaluateCGradient(results); figure pdeplot(model,"XYData",u(:,10),"Contour","on", ... "FlowData",[-cgradx(:,10),-cgrady(:,10)], ... "ColorMap","hot") axis equal

Input Arguments
Output Arguments
Tips
While the
resultsobject contains the solution and its gradient (both calculated at the nodal points of the triangular or tetrahedral mesh), it does not contain the flux of the PDE solution. To compute the flux at the nodal locations, callevaluateCGradientwithout specifying locations. By default,evaluateCGradientuses nodal locations.
Version History
Introduced in R2016b