Minimization with Gradient and Hessian Sparsity Pattern
This example shows how to solve a nonlinear minimization problem with a tridiagonal Hessian matrix approximated by sparse finite differences instead of explicit computation.
The problem is to find to minimize
where = 1000.
n = 1000;
To use the trust-region method in fminunc, you must compute the gradient in the objective function; it is not optional as in the quasi-newton method.
The helper function brownfg at the end of this example computes the objective function and gradient.
To allow efficient computation of the sparse finite-difference approximation of the Hessian matrix , the sparsity structure of must be predetermined. In this case, the structure Hstr, a sparse matrix, is available in the file brownhstr.mat. Using the spy command, you can see that Hstr is, indeed, sparse (only 2998 nonzeros).
load brownhstr
spy(Hstr)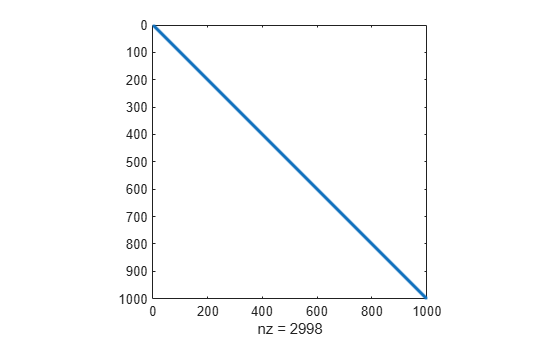
Set the HessPattern option to Hstr using optimoptions. When such a large problem has obvious sparsity structure, not setting the HessPattern option uses a great amount of memory and computation unnecessarily, because fminunc attempts to use finite differencing on a full Hessian matrix of one million nonzero entries.
To use the Hessian sparsity pattern, you must use the trust-region algorithm of fminunc. This algorithm also requires you to set the SpecifyObjectiveGradient option to true using optimoptions.
options = optimoptions(@fminunc,Algorithm="trust-region",... SpecifyObjectiveGradient=true,HessPattern=Hstr);
Set the objective function to @brownfg. Set the initial point to –1 for odd components and +1 for even components.
xstart = -ones(n,1); xstart(2:2:n,1) = 1; fun = @brownfg;
Solve the problem by calling fminunc using the initial point xstart and options options.
[x,fval,exitflag,output] = fminunc(fun,xstart,options);
Local minimum found. Optimization completed because the size of the gradient is less than the value of the optimality tolerance. <stopping criteria details>
Examine the solution and solution process.
disp(fval)
7.4739e-17
disp(exitflag)
1
disp(output)
iterations: 7
funcCount: 8
stepsize: 0.0046
cgiterations: 7
firstorderopt: 7.9822e-10
algorithm: 'trust-region'
message: 'Local minimum found.↵↵Optimization completed because the size of the gradient is less than↵the value of the optimality tolerance.↵↵<stopping criteria details>↵↵Optimization completed: The first-order optimality measure, 7.982184e-10, ↵is less than options.OptimalityTolerance = 1.000000e-06, and no negative/zero↵curvature is detected in the trust-region model.'
constrviolation: []
The function is a sum of powers of squares and, therefore, is nonnegative. The solution fval is nearly zero, so it is clearly a minimum. The exit flag 1 also indicates that fminunc finds a solution. The output structure shows that fminunc takes only seven iterations to reach the solution.
Display the largest and smallest elements of the solution.
disp(max(x))
1.9955e-10
disp(min(x))
-1.9955e-10
The solution is near the point where all elements of x = 0.
Helper Function
This code creates the brownfg helper function.
function [f,g] = brownfg(x) % BROWNFG Nonlinear minimization test problem % % Evaluate the function n=length(x); y=zeros(n,1); i=1:(n-1); y(i)=(x(i).^2).^(x(i+1).^2+1) + ... (x(i+1).^2).^(x(i).^2+1); f=sum(y); % Evaluate the gradient if nargout > 1 if nargout > 1 i=1:(n-1); g = zeros(n,1); g(i) = 2*(x(i+1).^2+1).*x(i).* ... ((x(i).^2).^(x(i+1).^2))+ ... 2*x(i).*((x(i+1).^2).^(x(i).^2+1)).* ... log(x(i+1).^2); g(i+1) = g(i+1) + ... 2*x(i+1).*((x(i).^2).^(x(i+1).^2+1)).* ... log(x(i).^2) + ... 2*(x(i).^2+1).*x(i+1).* ... ((x(i+1).^2).^(x(i).^2)); end end