fminimax
Solve minimax constraint problem
Syntax
Description
fminimax seeks a point that minimizes the maximum of a set of
objective functions.
The problem includes any type of constraint. In detail, fminimax
seeks the minimum of a problem specified by
where b and beq are vectors,
A and Aeq are matrices, and
ineqnonlin(x),
eqnonlin(x), and
F(x) are functions that return vectors.
F(x),
ineqnonlin(x), and
eqnonlin(x) can be nonlinear functions.
x, lb, and ub can be passed as
vectors or matrices; see Matrix Arguments.
You can also solve max-min problems with fminimax, using the
identity
You can solve problems of the form
by using the AbsoluteMaxObjectiveCount option; see Solve Minimax Problem Using Absolute Value of One Objective.
x = fminimax(fun,x0)x0 and finds a minimax solution x to the
functions described in fun.
Note
Passing Extra Parameters explains how to pass extra parameters to the objective functions and nonlinear constraint functions, if necessary.
x = fminimax(fun,x0,A,b,Aeq,beq,lb,ub)lb ≤ x ≤ ub.
If no equalities exist, set Aeq = [] and beq = []. If
x(i) is unbounded below, set lb(i) = –Inf; if
x(i) is unbounded above, set ub(i) = Inf.
Note
Note
If the specified input bounds for a problem are inconsistent, the output
x is x0 and the output fval
is [].
Examples
Create a plot of the sin and cos functions and their maximum over the interval [–pi,pi].
t = linspace(-pi,pi); plot(t,sin(t),"r-") hold on plot(t,cos(t),"b-"); plot(t,max(sin(t),cos(t)),"ko") legend("sin(t)","cos(t)","max(sin(t),cos(t))",Location="northwest")
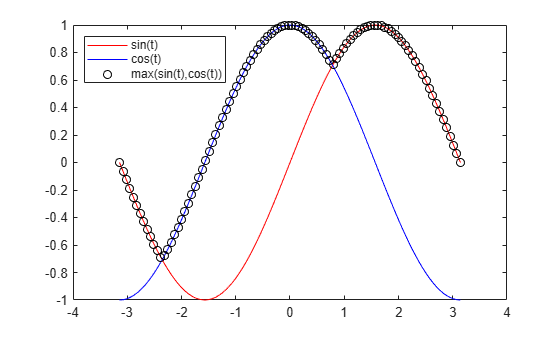
The plot shows two local minima of the maximum, one near 1, and the other near –2. Find the minimum near 1.
fun = @(x)[sin(x);cos(x)]; x0 = 1; x1 = fminimax(fun,x0)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x1 = 0.7854
Find the minimum near –2.
x0 = -2; x2 = fminimax(fun,x0)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x2 = -2.3562
The objective functions for this example are linear plus constants. For a description and plot of the objective functions, see Compare fminimax and fminunc.
Set the objective functions as three linear functions of the form for three vectors and three constants .
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
Find the minimax point subject to the inequality x(1) + 3*x(2) <= –4.
A = [1,3]; b = -4; x0 = [-1,-2]; x = fminimax(fun,x0,A,b)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
-5.8000 0.6000
The objective functions for this example are linear plus constants. For a description and plot of the objective functions, see Compare fminimax and fminunc.
Set the objective functions as three linear functions of the form for three vectors and three constants .
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
Set bounds that –2 <= x(1) <= 2 and –1 <= x(2) <= 1 and solve the minimax problem starting from [0,0].
lb = [-2,-1];
ub = [2,1];
x0 = [0,0];
A = []; % No linear constraints
b = [];
Aeq = [];
beq = [];
[x,fval] = fminimax(fun,x0,A,b,Aeq,beq,lb,ub)Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
-0.0000 1.0000
fval = 1×3
3.0000 -2.0000 3.0000
In this case, the solution is not unique. Many points satisfy the constraints and have the same minimax value. Plot the surface representing the maximum of the three objective functions, and plot a red line showing the points that have the same minimax value.
[X,Y] = meshgrid(linspace(-2,2),linspace(-1,1)); Z = max(fun([X(:),Y(:)]),[],2); Z = reshape(Z,size(X)); surf(X,Y,Z,'LineStyle','none') view(-118,28) hold on line([-2,0],[1,1],[3,3],'Color','r','LineWidth',8) hold off

The objective functions for this example are linear plus constants. For a description and plot of the objective functions, see Compare fminimax and fminunc.
Set the objective functions as three linear functions of the form for three vectors and three constants .
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
The unitdisk function represents the nonlinear inequality constraint .
function [ineqnonlin,eqnonlin] = unitdisk(x) ineqnonlin = x(1)^2 + x(2)^2 - 1; eqnonlin = []; end
Solve the minimax problem subject to the unitdisk constraint, starting from x0 = [0,0].
x0 = [0,0];
A = []; % No other constraints
b = [];
Aeq = [];
beq = [];
lb = [];
ub = [];
nonlcon = @unitdisk;
x = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon)Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
-0.0000 1.0000
fminimax can minimize the maximum of either or for the first several values of by using the AbsoluteMaxObjectiveCount option. To minimize the absolute values of of the objectives, arrange the objective function values so that through are the objectives for absolute minimization, and set the AbsoluteMaxObjectiveCount option to k.
In this example, minimize the maximum of sin and cos, specify sin as the first objective, and set AbsoluteMaxObjectiveCount to 1.
fun = @(x)[sin(x),cos(x)]; options = optimoptions("fminimax",AbsoluteMaxObjectiveCount=1); x0 = 1; A = []; % No constraints b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; x1 = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x1 = 0.7854
Try starting from x0 = –2.
x0 = -2; x2 = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x2 = -3.1416
Plot the function.
t = linspace(-pi,pi); plot(t,max(abs(sin(t)),cos(t)))
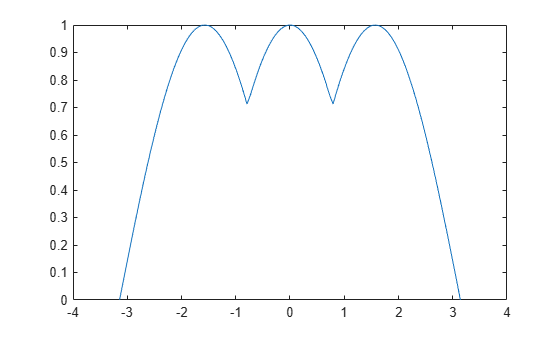
To see the effect of the AbsoluteMaxObjectiveCount option, compare this plot to the plot in the example Minimize Maximum of sin and cos.
Obtain both the location of the minimax point and the value of the objective functions. For a description and plot of the objective functions, see Compare fminimax and fminunc.
Set the objective functions as three linear functions of the form for three vectors and three constants .
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
Set the initial point to [0,0] and find the minimax point and value.
x0 = [0,0]; [x,fval] = fminimax(fun,x0)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
-2.5000 2.2500
fval = 1×3
1.7500 1.7500 1.7500
All three objective functions have the same value at the minimax point. Unconstrained problems typically have at least two objectives that are equal at the solution, because if a point is not a local minimum for any objective and only one objective has the maximum value, then the maximum objective can be lowered.
The objective functions for this example are linear plus constants. For a description and plot of the objective functions, see Compare fminimax and fminunc.
Set the objective functions as three linear functions of the form for three vectors and three constants .
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
Find the minimax point subject to the inequality x(1) + 3*x(2) <= –4.
A = [1,3]; b = -4; x0 = [-1,-2];
Set options for iterative display, and obtain all solver outputs.
options = optimoptions("fminimax",Display="iter"); Aeq = []; % No other constraints beq = []; lb = []; ub = []; nonlcon = []; [x,fval,maxfval,exitflag,output,lambda] =... fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Objective Max Line search Directional
Iter F-count value constraint steplength derivative Procedure
0 4 0 6
1 9 5 0 1 0.981
2 14 4.889 0 1 -0.302 Hessian modified twice
3 19 3.4 8.132e-09 1 -0.302 Hessian modified twice
Local minimum possible. Constraints satisfied.
fminimax stopped because the size of the current search direction is less than
twice the value of the step size tolerance and constraints are
satisfied to within the value of the constraint tolerance.
<stopping criteria details>
x = 1×2
-5.8000 0.6000
fval = 1×3
-3.2000 3.4000 3.4000
maxfval = 3.4000
exitflag = 4
output = struct with fields:
iterations: 4
funcCount: 19
lssteplength: 1
stepsize: 6.0684e-10
algorithm: 'active-set'
firstorderopt: []
constrviolation: 8.1323e-09
message: 'Local minimum possible. Constraints satisfied.↵↵fminimax stopped because the size of the current search direction is less than↵twice the value of the step size tolerance and constraints are ↵satisfied to within the value of the constraint tolerance.↵↵<stopping criteria details>↵↵Optimization stopped because the norm of the current search direction, 4.555376e-10,↵is less than 2*options.StepTolerance = 1.000000e-06, and the maximum constraint ↵violation, 8.132311e-09, is less than options.ConstraintTolerance = 1.000000e-06.'
lambda = struct with fields:
lower: [2×1 double]
upper: [2×1 double]
eqlin: [0×1 double]
eqnonlin: [0×1 double]
ineqlin: 0.2000
ineqnonlin: [0×1 double]
Examine the returned information:
Two objective function values are equal at the solution.
The solver converges in 4 iterations and 19 function evaluations.
The
lambda.ineqlinvalue is nonzero, indicating that the linear constraint is active at the solution.
Input Arguments
Output Arguments
Algorithms
fminimax solves a minimax problem by converting it into a goal
attainment problem, and then solving the converted goal attainment problem using
fgoalattain. The conversion sets all goals to 0 and all weights to 1.
See Equation 1 in
Multiobjective Optimization Algorithms.
Alternative Functionality
App
The Optimize Live Editor task provides a visual interface for fminimax.
Extended Capabilities
Version History
Introduced before R2006a