Sliding Mode Observer
Compute electrical position and mechanical speed of rotor
Libraries:
mcbpositiondecoderlib /
Archive
Description
The Sliding Mode Observer block computes the electrical position and mechanical speed of a PMSM by using the per unit voltage and current values along the α- and β-axes of the stationary αβ reference frame.
Equations
These equations describe the computation of the electrical position and mechanical speed by the block.
These equations describe the discrete-time sliding mode observer operation by using per-unit values:
where:
are the stator back EMF and current for the α axis.
are the stator back EMF and current for the β axis.
are the stator supply voltages.
is the stator resistance.
is the stator inductance.
is the flux linkage due to permanent magnet.
is the electrical angular velocity.
is the electrical position of the rotor.
is the time.
is the sampling period.
is the sample count.
is the nominal voltage corresponding to 1 per-unit.
is the nominal current corresponding to 1 per-unit.
is the attraction function.

is the cut-off frequency of the filter in cycles per sample.
is the cut-off frequency in cycles per second.
is the sample frequency in samples per second.
is the estimated back EMF.
Tuning
Use the Current observer gain and Sliding surface limit parameters to tune the block.
To improve stability, increase the Sliding surface limit or reduce the Current observer gain.
To reduce distortion, decrease the Current observer gain or increase the Sliding surface limit.
Examples
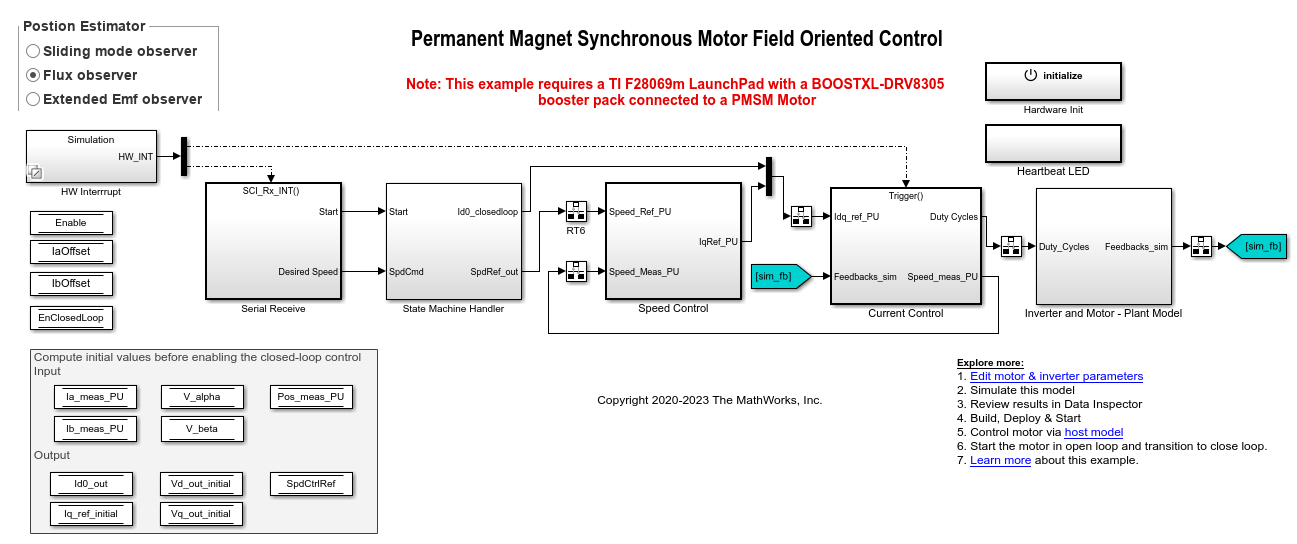
Sensorless Field-Oriented Control of PMSM
Implements the field-oriented control (FOC) technique to control the speed of a three-phase permanent magnet synchronous motor (PMSM). For details about FOC, see Field-Oriented Control.
Ports
Input
Output
Parameters
References
[1] Y. Kung, N. V. Quynh, C. Huang and L. Huang, "Design and simulation of adaptive speed control for SMO-based sensorless PMSM drive," 2012 4th International Conference on Intelligent and Advanced Systems (ICIAS2012), Kuala Lumpur, 2012, pp. 439-444 (doi: 10.1109/ICIAS.2012.6306234)
[2] Zhang Yan and V. Utkin, "Sliding mode observers for electric machines-an overview," IEEE 2002 28th Annual Conference of the Industrial Electronics Society. IECON 02, Sevilla, 2002, pp. 1842-1847 vol.3. (doi: 10.1109/IECON.2002.1185251)
[3] T. Bernardes, V. F. Montagner, H. A. Gründling and H. Pinheiro, "Discrete-Time Sliding Mode Observer for Sensorless Vector Control of Permanent Magnet Synchronous Machine," in IEEE Transactions on Industrial Electronics, vol. 61, no. 4, pp. 1679-1691, April 2014 (doi: 10.1109/TIE.2013.2267700)
[4] Z. Guo and S. K. Panda, "Design of a sliding mode observer for sensorless control of SPMSM operating at medium and high speeds," 2015 IEEE Symposium on Sensorless Control for Electrical Drives (SLED), Sydney, NSW, 2015, pp. 1-6. (doi: 10.1109/SLED.2015.7339255)
Extended Capabilities
Version History
Introduced in R2020a