ACIM Parameter Estimation Configurator
Generate configuration elements for AC induction motor (ACIM) parameter estimation
Since R2023a
Libraries:
Motor Control Blockset /
Parameter Estimation /
ACIM Parameter Estimation
Description
The ACIM Parameter Estimation Configurator block generates the following configuration elements for estimating the parameters of an AC induction motor:
Elements for motor and inverter hardware
Elements for estimating magnetizing current Id0
Elements for estimating motor resistance (Rs)
Elements for estimating:
Rotor resistance, Rr
Magnetizing inductance, Lm
Stator leakage inductance, Lls
Rotor leakage inductance, Llr
Elements for estimating motor inertia (J) and friction constant (B)
The block uses the parameter settings to generate an output bus containing the configuration elements. You can use the configuration elements in these ACIM parameter estimation blocks:
Examples
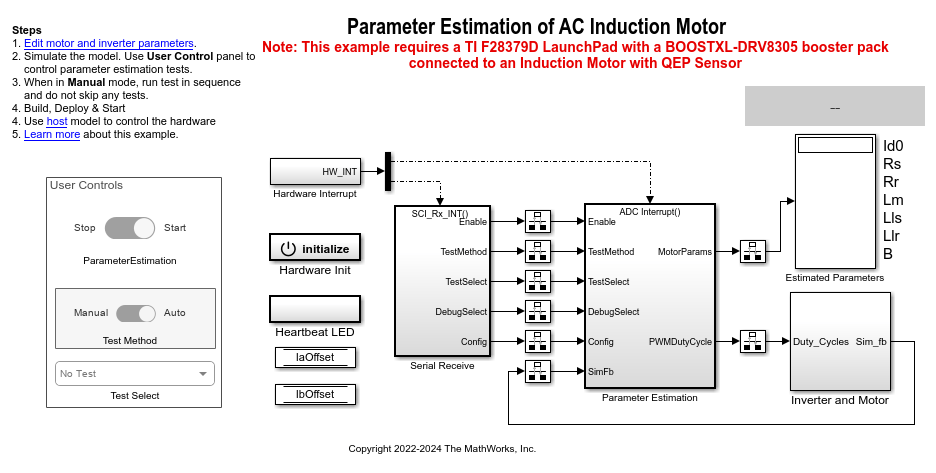
Estimate Induction Motor Parameters Using Parameter Estimation Blocks
Uses the parameter estimation blocks provided by Motor Control Blockset™ to estimate these parameters of an AC induction motor (ACIM):
Ports
Output
The bus signal includes these configuration elements.
| Category | Configuration element | Units | ||
|---|---|---|---|---|
Elements for motor and inverter hardware | Number of pole pairs | - | ||
Rated frequency | Hz | |||
Nominal motor current | A | |||
Nominal voltage | V | |||
Maximum measurable inverter current | A | |||
Board resistance | ohm | |||
Current sense gain | A/ADC Count | |||
Voltage sense gain | V/ADC Count | |||
Elements for estimating magnetizing current Id0 | Measurement time | seconds | ||
Open-loop ramp time | seconds | |||
Elements for estimating motor resistance (Rs) | Estimation time | seconds | ||
Vd reference voltage 1 | PU voltage | |||
Vd reference voltage 2 | PU voltage | |||
Elements for estimating rotor resistance (Rr), magnetizing inductance (Lm), stator leakage inductance (Lls), and rotor leakage inductance (Llr) | Frequency 1 as a ratio of rated frequency | PU frequency | ||
Frequency 2 as a ratio of rated frequency | PU frequency | |||
| High frequency for Lm | Hz | |||
Start voltage for voltage sweep | PU voltage | |||
Voltage step for voltage sweep | PU voltage | |||
High-frequency injection voltage | PU voltage | |||
Elements for estimating motor inertia (J) and friction constant (B) | Closed-loop speed duration | seconds | ||
Closed-loop speed | RPM | |||
Iq Reference current for FOC | PU current | |||
Proportional gain | - | |||
Integral gain | - | |||
Lower speed limit for inertia estimation | RPM | |||
- | Parameter estimation sample time | seconds | ||
The configuration elements are analogous to the block parameters. For more information about these elements, see Parameters.
Data Types: single
Parameters
Motor and Inverter
Number of pole pairs available in the induction motor.
Rated frequency of the induction motor (in Hertz).
Rated current of the induction motor (in Amperes).
Rated voltage of the induction motor (in Volts).
Maximum current (in Amperes) that the system (including inverter and controller) can measure.
Resistance in the path of phase currents (excluding motor resistance). You can obtain this value from the datasheet of the inverter hardware.
Gain of the current sense circuit of the inverter. This value determines the current (in Amperes) corresponding to one analog-to-digital converter (ADC) count (resolution of the measurable current range).
Gain of the voltage sense circuit of the inverter. This value determines the voltage (in Volts) corresponding to one analog-to-digital converter (ADC) count (resolution of the measurable voltage range).
Id0 Estimation
Time used to measure and average-out the peaks in the current response to the open-loop operation of the induction motor. For more details about Id0 estimation, see Id0 Estimator.
Time that you want to allot for the motor operation frequency to ramp up and reach 90 percent of the motor rated frequency. For more details about Id0 estimation, see Id0 Estimator.
Rs Estimation
Time that you want to allot to run the motor resistance (Rs) estimation algorithm. This value defines the time duration for which the ACIM Rs Estimator block injects each voltage to measure the motor resistance. For more details about Rs estimation, see ACIM Rs Estimator.
The first reference motor-phase voltage (in per-unit) that the ACIM Rs Estimator block uses for measuring motor resistance (Rs). By default, the block sets this field to 10 percent of the inverter DC voltage. For more details about Rs estimation, see ACIM Rs Estimator. For more details about the per-unit system, see Per-Unit System.
The second reference motor-phase voltage (in per-unit) that the ACIM Rs Estimator block uses for measuring motor resistance (Rs). By default, the block sets this field to 20 percent of the inverter DC voltage. For more details about Rs estimation, see ACIM Rs Estimator. For more details about the per-unit system, see Per-Unit System.
Rr, Lm, Lls, Llr Estimation
Ratio of the first injected low frequency over the rated frequency of the induction motor (in per-unit). For more details about the estimation process, see RrL Estimator. For more details about the per-unit system, see Per-Unit System.
Ratio of the second injected low frequency over the rated frequency of the induction motor (in per-unit). For more details about the estimation process, see RrL Estimator. For more details about the per-unit system, see Per-Unit System.
Frequency of the third (high frequency) signal (in Hertz) injected by the block for mechanical parameter estimation. For more details about the estimation process, see RrL Estimator.
Initial voltage (of the first and second low-frequency signals that the block injects, in per-unit) at which the voltage sweep begins. For more details about the estimation process, see RrL Estimator. For more details about the per-unit system, see Per-Unit System.
Step size that the block uses to perform voltage sweep on the two injected low frequency signals (in per-unit). For more details about the estimation process, see RrL Estimator. For more details about the per-unit system, see Per-Unit System.
Voltage of the third (high frequency) signal (in per-unit) injected by the block for mechanical parameter estimation. For more details about the estimation process, see RrL Estimator. For more details about the per-unit system, see Per-Unit System.
Time delay between an instance of current change and the point of time when the changed current is measured in the microcontroller.
J, B Estimation
Duration (in seconds) for which the ACIM Mechanical Parameter Estimator block runs the motor using closed-loop control before initiating coast-down. For more information about the estimation process, see ACIM Mechanical Parameter Estimator.
Speed (in RPM) at which the ACIM Mechanical Parameter Estimator block runs the motor using closed-loop control. For more information about the estimation process, see ACIM Mechanical Parameter Estimator.
Reference current, Iq (in units of the motor rated current), to achieve the reference speed specified in the Closed loop speed (RPM) parameter. For more information about the estimation process, see ACIM Mechanical Parameter Estimator.
Select this parameter to enable these fields:
Proportional gain
Integral gain
You can use these fields to enter the proportional and integral gains of the PI current controllers that implement closed-loop control to estimate J and B.
If you clear this parameter, the block automatically computes the proportional and integral gains.
To know more about the estimation process, see ACIM Mechanical Parameter Estimator.
Proportional gain, kp, of the PI current controller that implements field-oriented control to run the motor in closed-loop control and estimate J and B.
Dependencies
To enable this parameter, select the Specify current controller gains parameter.
Integral gain, ki, of the PI current controller that implements field-oriented control to run the motor in closed-loop control and estimate J and B.
Dependencies
To enable this parameter, select the Specify current controller gains parameter.
Lower speed limit during coast-down at which the ACIM Mechanical Parameter Estimation block registers the timestamp for estimating motor inertia. For more details about the estimation process, see ACIM Mechanical Parameter Estimation.
Sample time for the parameter estimation algorithm. This parameter defines the sample time for these parameter estimation blocks for AC induction motors:
Id0 Estimator
ACIM Rs Estimator
Rr L Estimator
ACIM Mechanical Parameter Estimator
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2023a
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)