mpu6050
Connect MPU-6050 sensor on Raspberry Pi hardware I2C bus
Description
The mpu6050 object reads linear acceleration and angular velocity
along the X, Y, and Z axes using the InvenSense I2C-based MPU-6050 inertial measurement unit
(IMU) sensor interfaced with the Raspberry Pi® hardware. Before you use the mpu6050 object, ensure that the
I2C interface is enabled on your Raspberry Pi kernel. You can then create a connection to the Raspberry Pi board using the raspi object and set its properties. For more
information, see raspi.
Note
To generate C/C++ code for this object and its associated functions, you must have an Embedded Coder® license.
Creation
Description
sensor = mpu6050(mypi)mypi.
sensor = mpu6050(mypi,Name,Value)Name,Value arguments.
Input Arguments
Name-Value Arguments
Object Functions
readAcceleration | Read one acceleration data sample from MPU-6050 sensor |
readAngularVelocity | Read one angular velocity data sample from MPU-6050 sensor |
Examples
Ensure that the I2C interface on the Raspberry Pi kernel is enabled and then create an mpu6050 sensor object.
You can enable the I2C interface using:
Raspberry Pi Kernel I2C Interfacing options on Linux terminal. For more information, see Enable I2C Interface on Raspberry Pi Hardware Kernel or
Raspberry Pi Resource Monitor App. For more information, see Enable External Peripherals on Raspberry Pi Hardware Kernel Using Raspberry Pi Resource Monitor App.
Create a connection from MATLAB® to the Raspberry Pi hardware board.
mypi = raspi('raspberrypi-hysdu8X38o','rocky','bullwinkle')
mypi =
Raspi with Properties:
DeviceAddress: 'raspberrypi-hysdu8X38o'
Port: 18734
BoardName: 'Raspberry Pi 3 Model B+'
AvailableLEDs: {'led0'}
AvailableDigitalPins: [4,5,6,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27]
AvailableSPIChannels: {‘CE0’,’CE1’}
AvailableI2CBuses: {'i2c-1'}
I2CBusSpeed: 100000
AvailabelWebCams: mmal service 16.1 (platform:bcm2835-v4l2)
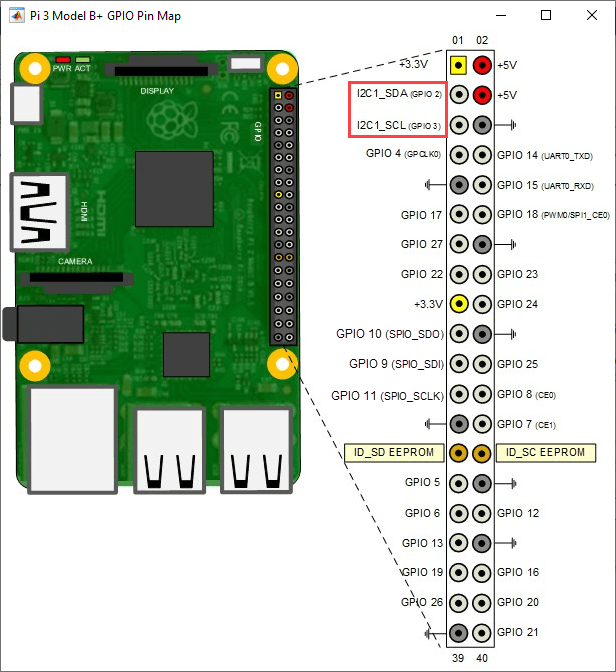
GPIO header pins I2C_SDA (GPIO 2) and I2C_SCL (GPIO 3) are used for I2C functionality. Display pin mapping of the Raspberry Pi hardware board.
showPins(mypi);
Get the address of the MPU-6050 sensor connected to the I2C bus
'i2c-1'.
sensor = scanI2CBus(mypi,'i2c-1');ans =
1×1 cell array
{'0x69'}Create an mpu6050 sensor object on the I2C bus
'i2c-1' on address '0x69'.
sensor = mpu6050(mypi,'Bus','i2c-1','I2CAddress','0x69');
sensor =
mpu6050 with properties:
I2CAddress: 105 ("0x69")
Bus: i2c-1Extended Capabilities
Version History
Introduced in R2021a