barycentricToCartesian
Convert coordinates from barycentric to Cartesian
Description
C = barycentricToCartesian(
returns the Cartesian coordinates of the points in TR,ID,B)B relative to
the triangulation object TR. Each row of B
contains the barycentric coordinates of a point with respect to the triangle or
tetrahedron indexed by ID. The identification numbers of the
triangles or tetrahedra in TR are the corresponding row numbers
of the property TR.ConnectivityList.
Examples
Create a triangulation from a set of points P and a triangulation connectivity list T, and plot the triangulation.
P = [2.5 8.0;
6.5 8.0;
2.5 5.0;
6.5 5.0;
1.0 6.5;
8.0 6.5];
T = [5 3 1;
3 2 1;
3 4 2;
4 6 2];
TR = triangulation(T,P);
triplot(TR)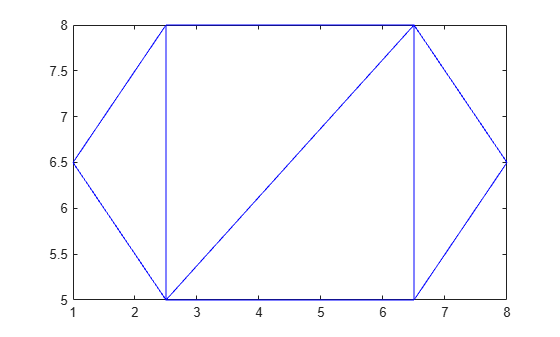
Specify the identification number of the first (leftmost) triangle in TR, and the barycentric coordinates of the triangle's second point.
ID = 1; B = [0 1 0];
Convert the barycentric coordinates to Cartesian coordinates with respect to the first triangle in TR.
C = barycentricToCartesian(TR,ID,B)
C = 1×2
2.5000 5.0000
Input Arguments
Extended Capabilities
Version History
Introduced in R2013a
See Also
cartesianToBarycentric | delaunayTriangulation | triangulation