Lidar Registration Analyzer
Description
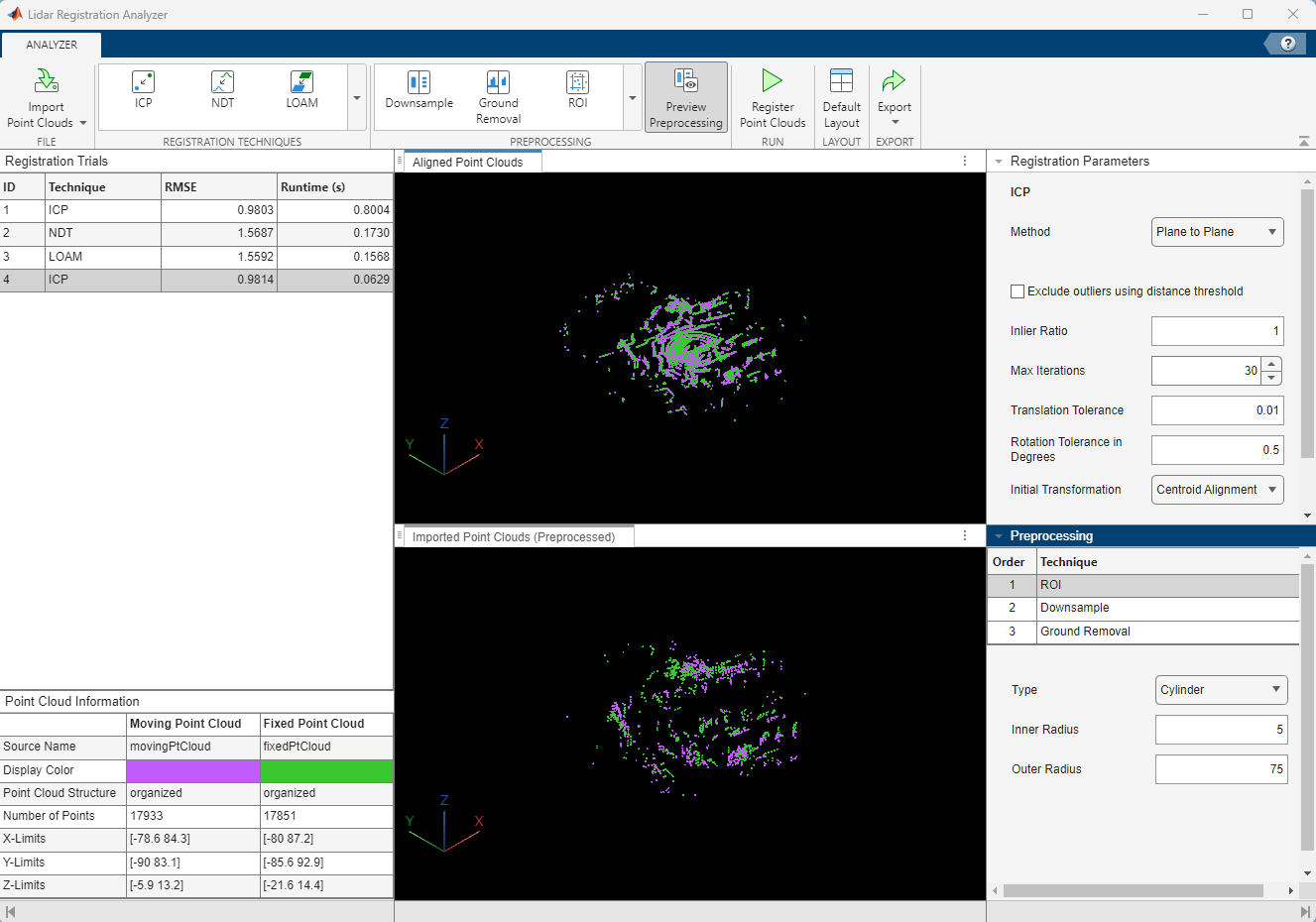
The Lidar Registration Analyzer app enables you to interactively register point clouds and compare the results of using different registration techniques. The app enables you to interactively:
Register point clouds
Visualize the alignment of the point clouds
Apply point cloud preprocessing techniques to optimize the speed and accuracy of the registration
Tune registration and preprocessing parameters
Preview the effects of preprocessing point clouds before attempting registration by viewing the original and preprocessed point clouds.
To learn more about this app, see Get Started with the Lidar Registration Analyzer App.
Open the Lidar Registration Analyzer App
MATLAB® Toolstrip: On the Apps tab, under Image Processing and Computer Vision, click the app icon,
 .
.MATLAB command prompt: Enter
lidarRegistrationAnalyzer.
Programmatic Use
Tips
You do not need to include preprocessing steps to register point clouds. Registering point clouds before you apply preprocessing steps can give you a good initial evaluation. For more details about using preprocessing techniques, see Add Preprocessing Steps for Point Cloud Registration.
Algorithms
The Lidar Registration Analyzer app offers various registration techniques for aligning point clouds. This table summarizes these techniques.
| Technique | Description | Iterative | Supports Unorganized Point Clouds | Relies on Initial Transformation | Feature-Based |
|---|---|---|---|---|---|
| Iterative closest point (ICP) | Minimizes the point-to-point, point-to-plane, or plane-to-plane distance between the points to align the point clouds. | ✓ | ✓ | ✓ | X |
| Normal distributions transform (NDT) | Uses normal distributions in each voxel to find the transformation that best aligns the point clouds. | ✓ | ✓ | ✓ | X |
| Lidar odometry and mapping (LOAM) | Feature-based approach that detects and matches edge points and surface points between the two point clouds, then minimizes the distance between the matched points to align the point clouds. | ✓ | X | ✓ | ✓ |
| Fast global registration (FGR) | Global registration method. Recommended when you do not have an initial transformation and the initial misalignment is significant. Based on fast point feature histogram (FPFH) features. | ✓ | ✓ | X | ✓ |
| Phase correlation | Recommended for ground vehicles, with a horizontally mounted lidar sensor moving on a flat surface in which the transformation can be described by a translation in the X-Y plane and a rotation around the Z-axis. | X | ✓ | X | X |
| Coherent point drift (CPD) | Computationally intensive technique recommended for small point clouds, of roughly 10,000 points or less, or for larger point clouds with significant downsampling. | ✓ | ✓ | X | X |
Version History
Introduced in R2024a
See Also
Apps
Functions
pcregistericp|pcregisterndt|pcregisterloam|pcregisterfgr|pcregistercpd|pcregistercorr|pcfitplane|findPointsInCylinder|findPointsInROI|pcdownsample|segmentGroundSMRF