ga
Find minimum of function using genetic algorithm
Syntax
Description
x = ga(fun,nvars)x, to the objective
function, fun. nvars is the dimension (number
of design variables) of fun.
Note
Passing Extra Parameters explains how to pass extra parameters to the objective function and nonlinear constraint functions, if necessary.
x = ga(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon)nonlcon.
The function nonlcon accepts x and returns
vectors ineqnonlin and eqnonlin, representing
the nonlinear inequalities and equalities respectively. ga
minimizes the fun such that
ineqnonlin(x) ≤ 0 and
eqnonlin(x) = 0. (Set lb=[] and
ub=[] if no bounds exist.)
x = ga(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon)x = ga(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)intcon take integer
values.
Note
When there are integer constraints, ga does not accept nonlinear equality constraints, only nonlinear inequality constraints.
Examples
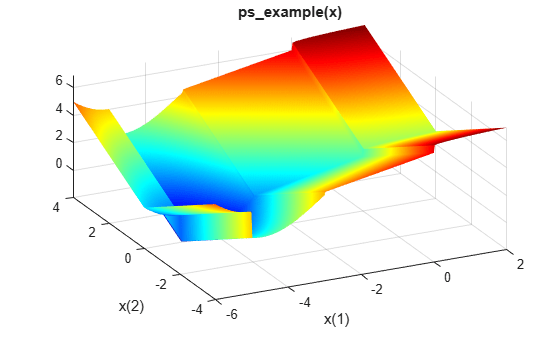
The ps_example.m file is included when you run this example. Plot the function.
xi = linspace(-6,2,300); yi = linspace(-4,4,300); [X,Y] = meshgrid(xi,yi); Z = ps_example([X(:),Y(:)]); Z = reshape(Z,size(X)); surf(X,Y,Z,MeshStyle="none") colormap("jet") view(-26,43) xlabel("x(1)") ylabel("x(2)") title("ps\_example(x)")
Find the minimum of this function using ga.
rng default % For reproducibility x = ga(@ps_example,2)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-4.6793 -0.0860
Use the genetic algorithm to minimize the ps_example function on the region x(1) + x(2) >= 1 and x(2) <= 5 + x(1). This function is included when you run this example.
First, convert the two inequality constraints to the matrix form A*x <= b. In other words, get the x variables on the left-hand side of the inequality, and make both inequalities less than or equal:
-x(1) -x(2) <= -1
-x(1) + x(2) <= 5
A = [-1,-1;
-1,1];
b = [-1;5];Solve the constrained problem using ga.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
0.9990 -0.0000
The constraints are satisfied to within the default value of the constraint tolerance, 1e-3. To see this, compute A*x' - b, which should have negative components.
disp(A*x' - b)
0.0010 -5.9990
Use the genetic algorithm to minimize the ps_example function on the region x(1) + x(2) >= 1 and x(2) == 5 + x(1). This function is included when you run this example.
First, convert the two constraints to the matrix form A*x <= b and Aeq*x = beq. In other words, get the x variables on the left-hand side of the expressions, and make the inequality into less than or equal form:
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
Solve the constrained problem using ga.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-2.0005 2.9995
Check that the constraints are satisfied to within the default value of ConstraintTolerance, 1e-3.
disp(A*x' - b)
1.0000e-03
disp(Aeq*x' - beq)
4.6326e-09
Use the genetic algorithm to minimize the ps_example function on the region x(1) + x(2) >= 1 and x(2) == 5 + x(1). The ps_example function is included when you run this example. In addition, set bounds 1 <= x(1) <= 6 and -3 <= x(2) <= 8.
First, convert the two linear constraints to the matrix form A*x <= b and Aeq*x = beq. In other words, get the x variables on the left-hand side of the expressions, and make the inequality into less than or equal form:
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
Set bounds lb and ub.
lb = [1 -3]; ub = [6 8];
Solve the constrained problem using ga.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq,lb,ub)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
1.0000 6.0000
Check that the linear constraints are satisfied to within the default value of ConstraintTolerance, 1e-3.
disp(A*x' - b)
-6.0000
disp(Aeq*x' - beq)
-9.4320e-07
Use the genetic algorithm to minimize the ps_example function on the region and . The ps_example function is included when you run this example.
To do so, use the function ellipsecons that returns the inequality constraint in the first output, ineqnonlin, and the equality constraint in the second output, eqnonlin.
function [ineqnonlin,eqnonlin] = ellipsecons(x) ineqnonlin = 2*x(1)^2 + x(2)^2 - 3; eqnonlin = (x(1)+1)^2 - (x(2)/2)^4; end
Include a function handle to ellipsecons as the nonlcon argument.
nonlcon = @ellipsecons; fun = @ps_example; rng default % For reproducibility x = ga(fun,2,[],[],[],[],[],[],nonlcon)
Optimization finished: average change in the fitness value less than options.FunctionTolerance and constraint violation is less than options.ConstraintTolerance.
x = 1×2
-0.9766 0.0362
Check that the nonlinear constraints are satisfied at x. The constraints are satisfied when ineqnonlin ≤ 0 and eqnonlin = 0 to within the default value of ConstraintTolerance, 1e-3.
[ineqnonlin,eqnonlin] = nonlcon(x)
ineqnonlin = -1.0911
eqnonlin = 5.4645e-04
Use the genetic algorithm to minimize the ps_example function on the region x(1) + x(2) >= 1 and x(2) == 5 + x(1) using a constraint tolerance that is smaller than the default. The ps_example function is included when you run this example.
First, convert the two constraints to the matrix form A*x <= b and Aeq*x = beq. In other words, get the x variables on the left-hand side of the expressions, and make the inequality into less than or equal form:
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
To obtain a more accurate solution, set a constraint tolerance of 1e-6. And to monitor the solver progress, set a plot function.
options = optimoptions("ga",ConstraintTolerance=1e-6,PlotFcn=@gaplotbestf);Solve the minimization problem.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq,[],[],[],options)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.

x = 1×2
-2.0000 3.0000
Check that the linear constraints are satisfied to within 1e-6.
disp(A*x' - b)
9.9983e-07
disp(Aeq*x' - beq)
-2.9611e-08
Use the genetic algorithm to minimize the ps_example function subject to the constraint that x(1) is an integer. This function is included when you run this example.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; x = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
Use the genetic algorithm to minimize an integer-constrained nonlinear problem. Obtain both the location of the minimum and the minimum function value. The objective function, ps_example, is included when you run this example.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; [x,fval] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
fval = -1.8344
Compare this result to the solution of the problem with no constraints.
[x,fval] = ga(fun,2)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-4.6906 -0.0078
fval = -1.9918
Use the genetic algorithm to minimize the ps_example function constrained to have x(1) integer-valued. The ps_example function is included when you run this example. To understand the reason the solver stopped and how ga searched for a minimum, obtain the exitflag and output results. Also, plot the minimum observed objective function value as the solver progresses.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; options = optimoptions("ga",PlotFcn=@gaplotbestf); [x,fval,exitflag,output] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)
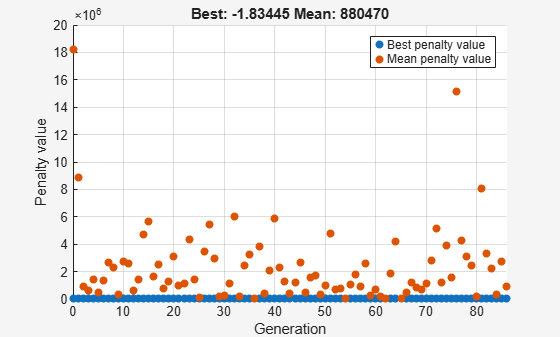
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
fval = -1.8344
exitflag = 1
output = struct with fields:
problemtype: 'integerconstraints'
rngstate: [1×1 struct]
generations: 86
funccount: 3311
message: 'ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and ↵the constraint violation is less than options.ConstraintTolerance.'
maxconstraint: 0
hybridflag: []
Use the genetic algorithm to minimize the ps_example function constrained to have x(1) integer-valued. The ps_example function is included when you run this example. Obtain all outputs, including the final population and vector of scores.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; [x,fval,exitflag,output,population,scores] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon);
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
Examine the first 10 members of the final population and their corresponding scores. Notice that x(1) is integer-valued for all these population members. The integer ga algorithm generates only integer-feasible populations.
disp(population(1:10,:))
1.0e+03 *
-0.0050 -0.0001
-0.0050 -0.0001
-1.6420 0.0027
-1.5070 0.0010
-0.4540 0.0104
-0.2530 -0.0011
-0.1210 -0.0003
-0.1040 0.1314
-0.0140 -0.0010
0.0160 -0.0002
disp(scores(1:10))
1.0e+06 *
-0.0000
-0.0000
2.6798
2.2560
0.2016
0.0615
0.0135
0.0099
0.0001
0.0000
Input Arguments
Output Arguments
More About
Tips
To write a function with additional parameters to the independent variables that can be called by
ga, see Passing Extra Parameters.For problems that use the population type
Double Vector(the default),gadoes not accept functions whose inputs are of typecomplex. To solve problems involving complex data, write your functions so that they accept real vectors, by separating the real and imaginary parts.
Algorithms
For a description of the genetic algorithm, see How the Genetic Algorithm Works.
For a description of the mixed integer programming algorithm, see Integer ga Algorithm.
For a description of the nonlinear constraint algorithms, see Nonlinear Constraint Solver Algorithms for Genetic Algorithm.
Alternative Functionality
App
The Optimize Live Editor task provides a visual interface for ga.
References
[1] Goldberg, David E., Genetic Algorithms in Search, Optimization & Machine Learning, Addison-Wesley, 1989.
[2] A. R. Conn, N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Algorithm for Optimization with General Constraints and Simple Bounds”, SIAM Journal on Numerical Analysis, Volume 28, Number 2, pages 545–572, 1991.
[3] A. R. Conn, N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Barrier Algorithm for Optimization with General Inequality Constraints and Simple Bounds”, Mathematics of Computation, Volume 66, Number 217, pages 261–288, 1997.