Find Global or Multiple Local Minima
This example illustrates how GlobalSearch finds a global minimum efficiently, and how MultiStart finds many more local minima.
The objective function for this example has many local minima and a unique global minimum. In polar coordinates, the function is
where
Plot the functions and , and create a surface plot of the function .
figure subplot(1,2,1); fplot(@(r)(sin(r) - sin(2*r)/2 + sin(3*r)/3 - sin(4*r)/4 + 4) .* r.^2./(r+1), [0 20]) title(""); ylabel("g"); xlabel("r"); subplot(1,2,2); fplot(@(t)2 + cos(t) + cos(2*t-1/2)/2, [0 2*pi]) title(""); ylabel("h"); xlabel("t");
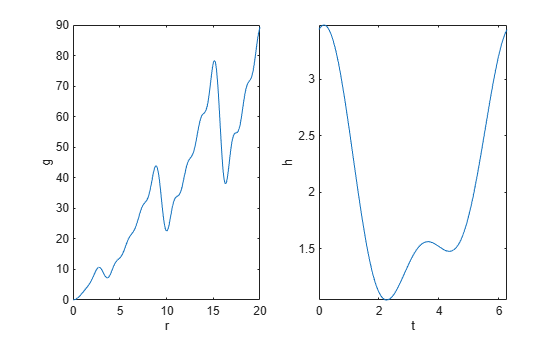
figure fsurf(@(x,y) sawtoothxy(x,y), [-20 20]) % sawtoothxy is defined in the first step below xlabel("x"); ylabel("y"); title("sawtoothxy(x,y)"); view(-18,52)
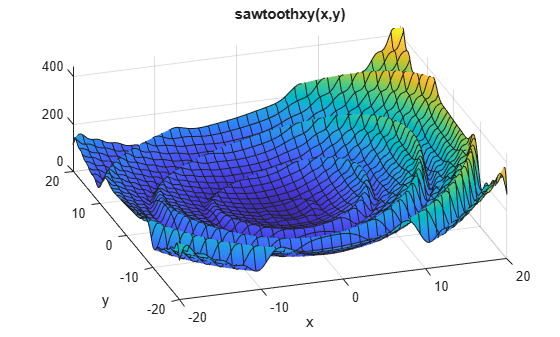
The global minimum is at , with objective function 0. The function grows approximately linearly in , with a repeating sawtooth shape. The function has two local minima, one of which is global.
The sawtoothxy.m file converts from Cartesian to polar coordinates, then computes the value in polar coordinates.
function f = sawtoothxy(x,y) [t r] = cart2pol(x,y); % change to polar coordinates h = cos(2*t - 1/2)/2 + cos(t) + 2; g = (sin(r) - sin(2*r)/2 + sin(3*r)/3 - sin(4*r)/4 + 4) ... .*r.^2./(r+1); f = g.*h; end
Single Global Minimum Via GlobalSearch
To search for the global minimum using GlobalSearch, first create a problem structure. Use the "sqp" algorithm for fmincon,
problem = createOptimProblem("fmincon",... objective=@(x)sawtoothxy(x(1),x(2)),... x0=[100,-50],... options=optimoptions(@fmincon,Algorithm="sqp",... Display="off"));
The start point is [100,-50] instead of [0,0] so GlobalSearch does not start at the global solution.
Validate the problem structure by running fmincon.
[x,fval] = fmincon(problem)
x = 1×2
45.7332 -107.6469
fval = 555.5422
Create the GlobalSearch object, and set iterative display.
gs = GlobalSearch(Display="iter");For reproducibility, set the random number generator seed.
rng(14,"twister")Run the solver.
[x,fval] = run(gs,problem)
Num Pts Best Current Threshold Local Local
Analyzed F-count f(x) Penalty Penalty f(x) exitflag Procedure
0 200 555.5 555.5 0 Initial Point
200 1463 1.547e-15 1.547e-15 1 Stage 1 Local
300 1564 1.547e-15 5.858e+04 1.074 Stage 2 Search
400 1664 1.547e-15 1.84e+05 4.16 Stage 2 Search
500 1764 1.547e-15 2.683e+04 11.84 Stage 2 Search
600 1864 1.547e-15 1.122e+04 30.95 Stage 2 Search
700 1964 1.547e-15 1.353e+04 65.25 Stage 2 Search
800 2064 1.547e-15 6.249e+04 163.8 Stage 2 Search
900 2164 1.547e-15 4.119e+04 409.2 Stage 2 Search
950 2356 1.547e-15 477 589.7 387 2 Stage 2 Local
952 2420 1.547e-15 368.4 477 250.7 2 Stage 2 Local
1000 2468 1.547e-15 4.031e+04 530.9 Stage 2 Search
GlobalSearch stopped because it analyzed all the trial points.
3 out of 4 local solver runs converged with a positive local solver exit flag.
x = 1×2
10-7 ×
0.0414 0.1298
fval = 1.5467e-15
The solver finds three local minima, including the global minimum near [0,0].
Multiple Local Minima Via MultiStart
To search for multiple minima using MultiStart, first create a problem structure. Because the problem is unconstrained, use the fminunc solver. Set options not to show any display at the command line.
problem = createOptimProblem("fminunc",... objective=@(x)sawtoothxy(x(1),x(2)),... x0=[100,-50],... options=optimoptions(@fminunc,Display="off"));
Validate the problem structure by running it.
[x,fval] = fminunc(problem)
x = 1×2
8.4420 -110.2602
fval = 435.2573
Create a default MultiStart object.
ms = MultiStart;
Run the solver for 50 iterations, recording the local minima.
rng(1) % For reproducibility
[x,fval,eflag,output,manymins] = run(ms,problem,50)MultiStart completed some of the runs from the start points. 10 out of 50 local solver runs converged with a positive local solver exitflag.
x = 1×2
-73.8348 -197.7810
fval = 766.8260
eflag = 2
output = struct with fields:
funcCount: 8574
localSolverTotal: 50
localSolverSuccess: 10
localSolverIncomplete: 40
localSolverNoSolution: 0
message: 'MultiStart completed some of the runs from the start points. ↵↵10 out of 50 local solver runs converged with a positive local solver exitflag.'
manymins=1×10 GlobalOptimSolution array with properties:
X
Fval
Exitflag
Output
X0
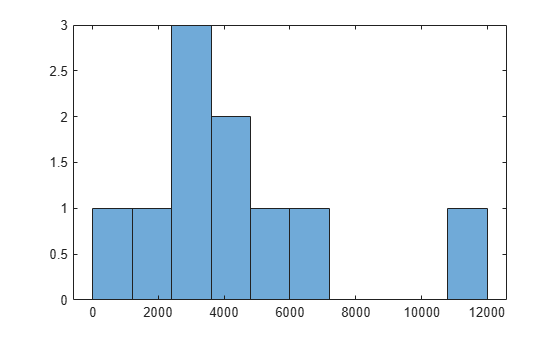
The solver does not find the global minimum near [0,0]. The solver finds 10 distinct local minima.
Plot the function values at the local minima:
histogram([manymins.Fval],10)
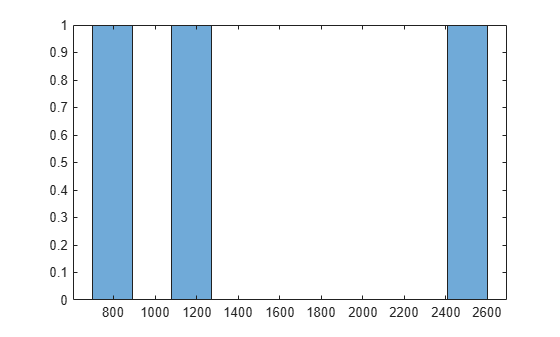
Plot the function values at the three best points:
bestf = [manymins.Fval]; histogram(bestf(1:3),10)
MultiStart starts fminunc from start points with components uniformly distributed between –1000 and 1000. fminunc often gets stuck in one of the many local minima. fminunc exceeds its iteration limit or function evaluation limit 40 times.
See Also
GlobalSearch | MultiStart | createOptimProblem