Systolic QR Decomposition
Libraries:
Fixed-Point Designer HDL Support /
Matrices and Linear Algebra /
Matrix Factorizations
Description
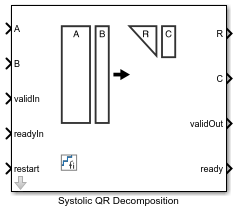
The Systolic QR Decomposition block uses QR decomposition to compute R and C = Q'B, where QR = A, and A and B are matrices. The least-squares solution to AX = B is X = R\C. R is an upper triangular matrix and Q is an orthogonal matrix. To compute C = Q', set B to be the identity matrix.
The systolic implementation to minimizes system latency and increases the throughput. Systolic implementations require more hardware resources than burst or partial-systolic implementations.
Examples
This example shows how to use the Systolic QR Decomposition block to compute the QR decomposition.
Economy Size QR Decomposition
The Systolic QR Decomposition block performs the first step of solving the least-squares matrix equation AX = B which transforms A in-place to R and B in-place to C = Q'B, then solves the transformed system RX = C, where QR is the orthogonal-triangular decomposition of A.
To compute the standalone QR decomposition, this example sets B to be the identity matrix so that the output of the Systolic QR Decomposition block is the upper-triangular R and C = Q'. For more information, see Systolic QR Decomposition.
I/O Interface
This block uses the AMBA AXI handshake protocol on both the input and the output side. On the input side, data transaction occurs when both validIn and ready signals are asserted. On the output side, data transaction occurs when both validOut and readyIn signals are asserted.
In this example, the validIn and readyIn signals remain asserted which indicates the upstream source and downstream sink are always available. When all matrices A and B are sent, the Data Handler loops back to the first A and B matrices.
Define Block Parameters
Specify the dimension of the sample matrices A and B, the number of input sample matrices, and the complexity of matrices A and B.
The Systolic QR Decomposition block supports both real and complex inputs. Set the complexity of the input in the block mask accordingly.
m = 3;
n = 3;
p = m;
numSamples = 3;
Complexity =  "real";
"real";Generate Input Matrices A and B
Use the specified simulation parameters to generate the input matrices A and B.
rng('default'); if strcmp(Complexity,'real') A = 2*(rand(m,n,numSamples)-0.5); B = repmat(eye(m),[1,1,numSamples]); else A = complex(2*(rand(m,n,numSamples)-0.5),... 2*(rand(m,n,numSamples)-0.5)); B = complex(repmat(eye(m),[1,1,numSamples])); end
Define and Cast to Input Data Type
Specify a data type for the inputs, and cast the inputs to that data type.
DT =  "fixed";
"fixed";For fixed-point data types, define the number of precision bits.
precisionBits = 18;
Cast the inputs to the selected data type.
T = fixed.qrFixedpointTypes(m,max(abs(A(:))),max(abs(B(:))),precisionBits); tv = castToDT(A,B,T,DT);
Open Model and Run Simulation
Open the FullSystolicQRModel model. Configure the model workspace and run the simulation.
model = 'FullSystolicQRModel';
open_system(model);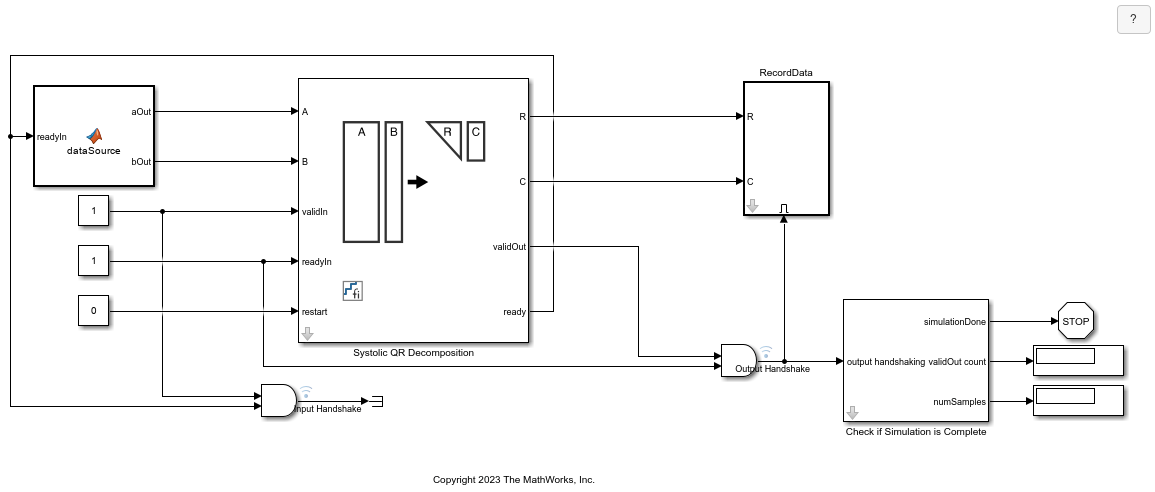
fixed.example.setModelWorkspace(model,'A',tv.A,'B',tv.B,... 'm',m,'n',n,'p',p,'OutputType',tv.OutputType,'numSamples',numSamples); dutName = [model '/Systolic QR Decomposition']; set_param(dutName,'complexity',Complexity); out = sim(model);
Verify Output Solutions
The Systolic QR Decomposition block computes C = Q'B. In this example, B is the identity matrix, so Q = C' is the economy-size orthogonal factor of the QR decomposition.
R_actual = out.R; C_actual = out.C;
To verify the solutions output by the model, check that
Q is orthogonal within round-off error,
R is an upper-triangular matrix, and
QR = A within round-off error.
for i = 1:numSamples Q = C_actual(:,:,i)'; I = Q'*Q R = R_actual(:,:,i); isequal(R,triu(R)) relative_error = norm(double(Q*R - A(:,:,i)))/norm(double(A(:,:,i))) end
I =
1.0000 0.0000 -0.0000
0.0000 1.0000 -0.0000
-0.0000 -0.0000 1.0000
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 46
FractionLength: 36
ans = logical
1
relative_error = 1.3990e-05
I =
1.0000 0.0000 -0.0000
0.0000 1.0000 -0.0000
-0.0000 -0.0000 1.0000
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 46
FractionLength: 36
ans = logical
1
relative_error = 2.4302e-05
I =
1.0000 0.0000 -0.0000
0.0000 1.0000 0.0000
-0.0000 0.0000 1.0000
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 46
FractionLength: 36
ans = logical
1
relative_error = 2.9015e-05
Verify Block Latency
The latency of the Systolic QR Decomposition block depends on the datatype, dimension, and complexity of input matrices A and B.
Use the embblk.latency.systolicQRBlockTiming function to calculate the expected minimum number of cycles between valid input samples and latency.
[expMinCyclesBetweenValidInputs,expLatency] = embblk.latency.systolicQRBlockTiming(tv.A,tv.B)
expMinCyclesBetweenValidInputs = 25
expLatency = 72
Retrieve actual block latency and minimum number of cycles between valid input samples from the simulation data.
tDataIn = find(out.logsout.get('Input Handshake').Values.Data == 1); tDataOut = find(out.logsout.get('Output Handshake').Values.Data == 1); actualMinCyclesBetweenValidInputs = diff(tDataIn)
actualMinCyclesBetweenValidInputs = 4×1
25
25
25
25
actualLatency = tDataOut - tDataIn(1:numSamples)
actualLatency = 3×1
72
72
72
Ports
Input
Output
Parameters
Algorithms
The Systolic QR Decomposition block accepts and process A and B as full matrices. After computation, the block outputs the R and C matrices. The systolic implementation uses a pipelined structure, so the block can accept new matrix inputs before outputting the result of the current matrix.
For example, assume that the input A and B matrices are 3-by-3. Additionally assume that validIn asserts before ready, meaning that the upstream data source is faster than the QR decomposition.
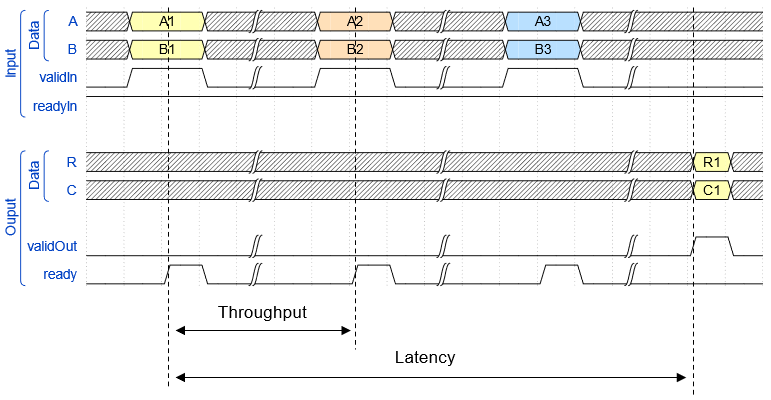
In the figure,
A1is the first A matrix,B1is the first B matrix, and so on.Minimum number of cycles between valid input samples — From a successful matrix input to the block being ready to accept the next matrix.
Latency — From a successful matrix input to the block starting to output the corresponding solution.
The latency of the Systolic QR Decomposition block depends on the size (m, n, p), complexity, and word length (wl) of matrices A and B.
If the data types of A and B are double, then wl is 53.
If the data type of A and B are single, then wl is 24.
If the data types of A and B are fixed point, then wl is the word length.
Use the embblk.latency.systolicQRBlockTiming function to calculate the minimum number
of cycles between valid input samples and
latency.
[minCyclesBetweenValidInputs,latency] = embblk.latency.systolicQRBlockTiming(A,B)
References
[1] "AMBA AXI and ACE Protocol Specification Version E." https://developer.arm.com/documentation/ihi0022/e/
Extended Capabilities
Version History
Introduced in R2024a