CORDIC Sigmoid HDL Optimized
Compute CORDIC-based sigmoid activation and generate optimized HDL code
Since R2024a
Libraries:
Fixed-Point Designer HDL Support /
Math Operations
Description
The CORDIC Sigmoid HDL Optimized block returns the sigmoid activation of u, computed using a CORDIC-based implementation optimized for HDL code generation.
Examples
This example demonstrates how to compute the sigmoid activation of a given real-valued set of data using the CORDIC Sigmoid HDL Optimized block.
Algorithm
The sigmoid function is defined by
which is equivalent to
The core algorithm of this block uses the CORDIC algorithm in hyperbolic rotation mode to compute the Hyperbolic Tangent HDL Optimized (tanh).
Supported Data Types
The CORDIC Sigmoid HDL Optimized block supports single, double, binary-point scaled fixed-point, and binary-point scaled-double data types for simulation. However, only binary-point scaled fixed-point data types are supported for HDL code generation.
I/O Interface
The CORDIC Sigmoid HDL Optimized block accepts data when the ready output is high, indicating that the block is ready to begin a new computation. Use validIn to indicate a valid input. If the block successfully registers the input value it will de-assert the ready signal; you must then wait until the signal is asserted again to send a new input. This protocol is summarized in the following wave diagram. Note how the first valid input to the block is discarded because the block was not ready to accept input data.

When the block has finished the computation and is ready to send the output, it will assert validOut for one clock cycle. Then ready will be asserted, indicating that the block is ready to accept a new input value.

Simulate the Model
Open the CORDICSigmoidModel model.
mdl = 'CORDICSigmoidModel';
open_system(mdl)
The model contains the CORDIC Sigmoid HDL Optimized block connected to a data source which takes in an array of inputs and passes an input value from the array to the CORDIC Sigmoid HDL Optimized block when it is ready to accept a new input. The output computed for each value is stored in a workspace variable. The simulation terminates when all inputs have been processed.
Define an array of inputs.
x = fi(linspace(-10,10,100));
Simulate the model.
sim(mdl);
When the simulation is complete, a new workspace variable, sigmoidOutput, is created to hold the computed value for each input.
Plot the Output
Plot the error of the calculation by comparing the output of the CORDIC Sigmoid HDL Optimized block to that of the MATLAB® cordicsigmoid function.
yMATLAB = cordicsigmoid(x); yMATLAB.numerictype
ans =
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 16
FractionLength: 14
sigmoidOutput.numerictype
ans =
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 16
FractionLength: 14
figure(1); plot(x, sigmoidOutput); hold on plot(x, yMATLAB); legend('CORDIC Sigmoid HDL Optimized block','cordicsigmoid Function');
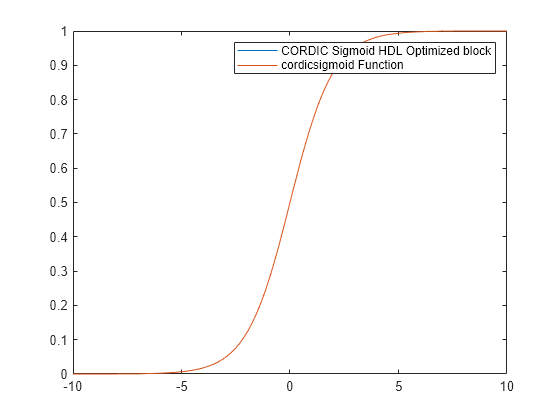
Verify the block output is bit-exact with the output of the cordicsigmoid function.
max(yMATLAB' - sigmoidOutput)
ans =
0
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 17
FractionLength: 14
Ports
Input
Output
Algorithms
The CORDIC Sigmoid HDL Optimized block accepts data when the ready output is high, indicating that the block is ready to begin a new computation. To send input data to the block, the validIn signal must be asserted. If the block successfully registers the input value it will de-assert the ready signal, and you must then wait until the signal is asserted again to send a new input. This protocol is summarized in the following wave diagram. Note how the first valid input to the block is discarded because the block was not ready to accept input data.

When the block has finished the computation and is ready to send the output, it will assert validOut for one clock cycle. Then ready will be asserted, indicating that the block is ready to accept a new input value.

References
[1] Volder, Jack E. “The CORDIC Trigonometric Computing Technique.” IRE Transactions on Electronic Computers EC-8, no. 3 (Sept. 1959): 330–334.
[2] Andraka, Ray. “A Survey of CORDIC Algorithm for FPGA Based Computers.” In Proceedings of the 1998 ACM/SIGDA Sixth International Symposium on Field Programmable Gate Arrays, 191–200. https://dl.acm.org/doi/10.1145/275107.275139.
[3] Walther, J.S. “A Unified Algorithm for Elementary Functions.” In Proceedings of the May 18-20, 1971 Spring Joint Computer Conference, 379–386. https://dl.acm.org/doi/10.1145/1478786.1478840.
[4] Schelin, Charles W. “Calculator Function Approximation.” The American Mathematical Monthly, no. 5 (May 1983): 317–325. https://doi.org/10.2307/2975781.
Extended Capabilities
Version History
Introduced in R2024a