Run Fault Simulations and View Results
This example shows how to run fault simulations. When you model faults, you often need to run more than one simulation. You can interactively run simulations, or adjust the parameters in your fault behaviors programmatically and automate the simulations with MATLAB® code. You can inspect the results in the Simulation Data Inspector.
Video Walkthrough
For a walkthrough of the example, play the video.
Simulate the Model Interactively
Open the sldemo_fuelsys_fault_analyzer model and set up the faults with the helper function, myFuelSysCase. The helper function deletes the existing Simulink® Fault Analyzer™ model artifacts and replaces them with the faults used in the example.
myFuelSysCase(4)
After executing the function, the model contains faults on each input port to the To Controller subsystem. The model has one activated fault, throttle_fault, that triggers when the time is 25. Simulate the model.
model = "sldemo_fuelsys_fault_analyzer";
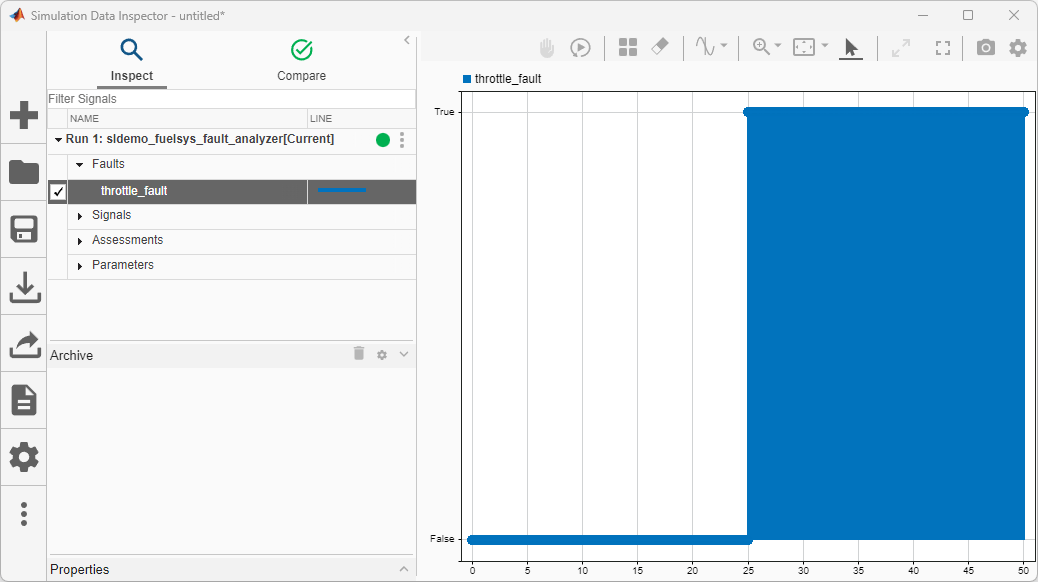
sim(model)To see the status of the faults throughout simulation, you can inspect the results with the Simulation Data Inspector. In the Fault Analyzer tab, in the Review Results section, click Data Inspector. You can also open the Simulation Data Inspector with this command:
Simulink.sdi.view
The Simulation Data Inspector logs the status of faults as either true or false. In this example, confirm that the fault does not inject until 25 seconds by expanding the Faults list for the first run and selecting the fault, throttle_fault, to plot the status versus time.
You can also confirm that the fault injected by opening the Fault Dashboard pane. In the Fault Analyzer tab, in the View section, click Fault Dashboard. The Simulation Results tab shows that the active fault, throttle_fault, triggered during the simulation.

Adjust Fault Properties and Simulate by Using Scripts
Each fault corresponds to a Fault object that has properties that you can adjust programmatically. In this example, increment the trigger time of the fault, throttle_fault, and simulate after each adjustment. This fault is on the first input port to To Controller.
To Controller is the only block with faults. To retrieve the paths of the faults as a string array, use the Simulink.fault.findFaultedElements function.
elements = Simulink.fault.findFaultedElements(model);
Each array element lists the model path to the input port in numerical order. For example, the first element of elements is the path to the first input port.
elements(1)
ans = "sldemo_fuelsys_fault_analyzer/To Controller/Inport/1"
Get the Fault object by using the Simulink.fault.findFaults function.
sweptFault = Simulink.fault.findFaults(model,... ModelElement=elements(1),Name="throttle_fault",TriggerType="Timed");
Enable faults on the first input port to To Controller, and disable faults on the other ports by using the Simulink.fault.enable function.
for n = 1:length(elements) if n == 1 Simulink.fault.enable(elements(n),true) else Simulink.fault.enable(elements(n),false) end end
Set throttle_fault as the active fault by using the activate function.
activate(sweptFault)
Turn fault simulation on by using the Simulink.fault.injection function.
Simulink.fault.injection(model,1);
throttle_fault uses a timed trigger. When the simulation reaches the specified trigger time, the fault is injected. To adjust the trigger time, modify the StartTime property of the Fault object. In this example, start at a trigger time of 10, and increment the trigger time by 2.
numberOfSims = 6; for n = 1:numberOfSims sweptFault.StartTime = 8+2*n; sim(model); end
Change Fault Behaviors and Simulate by Using Scripts
You can also modify the behavior of the faults in your Simulink® model by accessing the Fault Subsystem block in the fault model. In this example, adjust the behavior associated with the fault, ego_fault.
Get the Fault object for ego_fault.
sweptFault = Simulink.fault.findFaults(model,...
ModelElement=elements(3));Get the paths to the fault model and Fault Subsystem block associated with ego_fault by using the Simulink.fault.getFaultModels and getBehavior functions.
faultModel = Simulink.fault.getFaultModels(model); faultSubsystem = getBehavior(sweptFault);
Open the Fault Subsystem block ego_fault to view the behavior.
open_system(faultModel) open_system(faultSubsystem)
The behavior overrides the signal with a Constant block with a value equal to 12. In this example, adjust the value of this block. Enable faults on the third input port to To Controller and disable faults on the other input ports.
for n = 1:length(elements) if n == 3 Simulink.fault.enable(elements(n),true) else Simulink.fault.enable(elements(n),false) end end
Set ego_fault as the active fault.
activate(sweptFault)
Increment the Constant value parameter of the Constant block from 7 to 12 incrementing by 1 for each simulation.
sweptBlock = "Constant"; numberOfSims = 6; for n = 1:numberOfSims constVal = 6 + n; set_param(faultSubsystem + "/" + sweptBlock,Value=string(constVal)) sim(model); end
Additional Simulation Options
To capture the numerical results of simulation without saving changes to the model, simulate the model by defining a Simulink.SimulationInput object for the model and saving the simulation results to a Simulink.SimulationOutput object. After creating these objects, you can also run simulations by using parsim.
Automate Adding, Deleting, and Updating Faults
You can also create, delete, and update faults with programmatic options. For a list of programmatic options, see Fault Modeling and Fault Simulation. For an additional example, see Add and Configure Faults Programmatically.