Why Does Reading Data from the dsp.AsyncBuffer Object Give a Dimension Mismatch Error in MATLAB Function Block?
If you are reading data from an asynchronous buffer inside a MATLAB Function (Simulink) block, the block throws a dimension mismatch error if the output of the read function is not specified to be a variable-size signal.
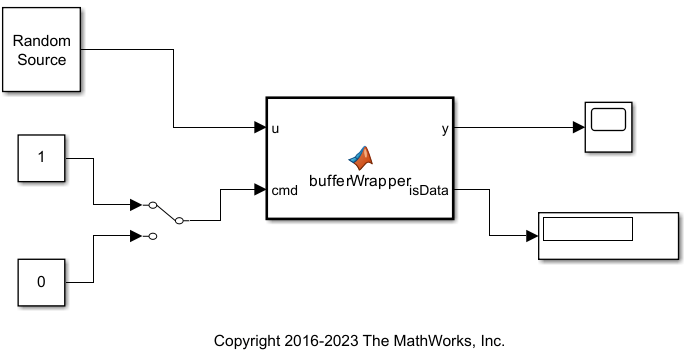
Here is the bufferWrapper function that contains the algorithm inside the MATLAB Function block. When input on the cmd port is 1, the dsp.AsyncBuffer object writes the data input u to the buffer. When input on the cmd port is 0, the object reads data from the buffer.
type bufferWrapper.mfunction [y,isData] = bufferWrapper(u,cmd)
persistent asyncBuff
if isempty(asyncBuff)
asyncBuff = dsp.AsyncBuffer;
setup(asyncBuff,u);
end
if cmd % write
write(asyncBuff,u);
y = zeros(3,1);
isData = false;
else % read
y = read(asyncBuff,3);
isData = true;
end
You must initialize the buffer by calling either write or setup before the first call to read.
During the write operation, the first output y is zeros(3,1) and the second output isData is 0. During the read operation, y is the data in the buffer and isData is 1.
Run the model and the following error occurs.
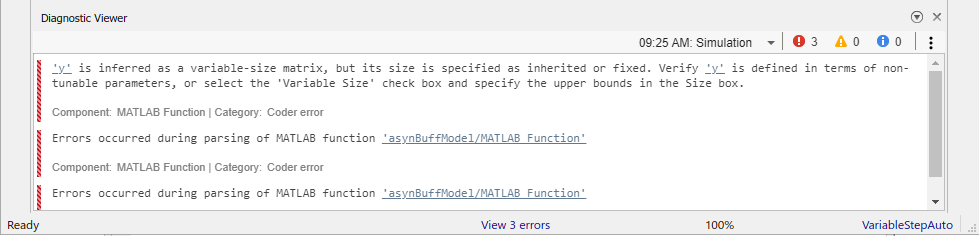
The output of read(asyncBuff,3) is variable sized. The output is variable sized because the size of the signal output by the read function depends on the input arguments to read. To resolve this error, set y as a variable-size signal and specify the upper bound.
In the MATLAB Function block Editor, click Modeling tab. In the Design section, click Symbols Pane. The Symbols pane opens on the right.
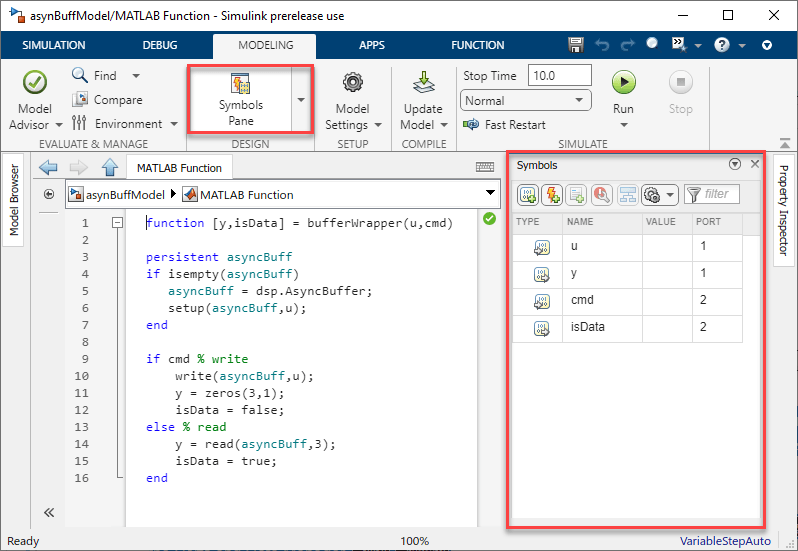
Right-click y and select Inspect.

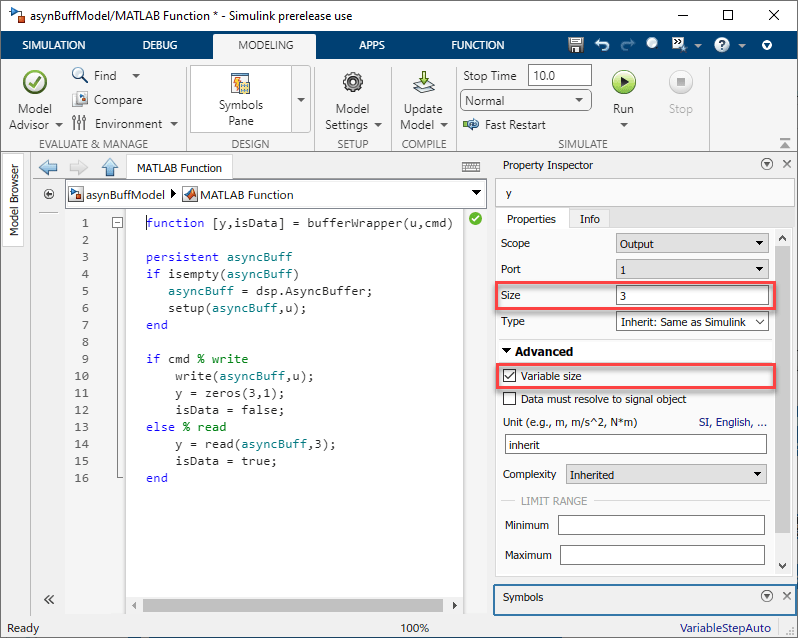
Property Inspector window opens. In the Advanced section, select the Variable size check box. Specify the Size to 3 since that is the size of the data the MATLAB function writes to the variable y.
Save and run the model. The error disappears. View the output y in the Time Scope.
With cmd = 0, no data is written into the buffer. Therefore, the output is 0. To write the input data u to the buffer, set cmd = 1. After you write some data, if you change cmd back to 0, the Time Scope output changes to the following.
See Also
Functions
Objects
Blocks
- MATLAB Function (Simulink) | Random Source | Constant | Time Scope