RLS Filter
Compute filtered output, filter error, and filter weights for given input and desired signal using RLS adaptive filter algorithm
Libraries:
DSP System Toolbox /
Filtering /
Adaptive Filters
Description
The RLS Filter block recursively computes the least squares estimate (RLS) of the FIR filter weights. The block estimates the filter weights (also known as the coefficients) needed to minimize the error e(n) between the output signal y(n) and the desired signal d(n). For more information, see Algorithms. For more information on adaptive filters, see Overview of Adaptive Filters and Applications.
Examples

Noise Canceler (RLS)
Subtract noise from an input signal using the Recursive Least Squares (RLS) algorithm. The RLS adaptive filter uses the reference signal on the Input port and the desired signal on the Desired port to automatically match the filter response in the Noise Filter block. As it converges to the correct filter, the filtered noise should be completely subtracted from the "Signal+Noise" signal, and the "Error Signal" should contain only the original signal.
Ports
Input
Specify the input signal you want to filter as a scalar or a column vector.
The input signal and the desired signal must have the same size, data type, and complexity.
The input signal can be a variable-size signal, that is, the frame length of the signal can change during simulation as long as the signal dimensions match with the input signal.
Data Types: single | double
Complex Number Support: Yes
Specify the signal you want to model as a scalar or a column vector. The RLS filter adapts its coefficients to minimize the error and converge the input signal to the desired signal as closely as possible.
The input signal and the desired signal must have the same size, data type, and complexity.
The desired signal can be a variable-size signal, that is, the frame length of the signal can change during simulation as long as the signal dimensions match with the input signal.
Data Types: single | double
Complex Number Support: Yes
Specify the RLS forgetting factor λ as a scalar in
the range 0 ≤ λ ≤
1 through this input port. For more information
on this parameter, see the Forgetting factor (0 to
1) parameter description.
Dependencies
To enable this port, set the Specify forgetting factor
via parameter as Input
port.
Data Types: single | double
If the input is a nonzero value, the block continuously updates the filter weights. If the value of this input is zero, the filter weights remain at their current values.
Dependencies
To enable this port, select the Adapt port parameter.
Data Types: single | double
Specify the reset signal as a scalar signal. When you want to reset the value of the filter weights to their initial values, use the Reset port parameter. The block resets the filter weights whenever a reset event is detected at the Reset port. The reset signal rate must be the same rate as the data signal input.
To enable the Reset port, select one of these options from the Reset port list:
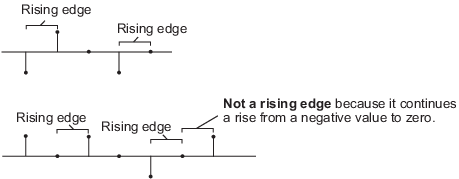
Rising edge— Triggers a reset operation when the Reset input does one of the following:Rises from a negative value to a positive value or zero
Rises from zero to a positive value, where the rise is not a continuation of a rise from a negative value to zero
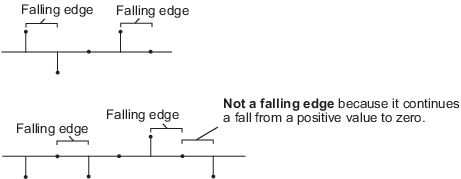
Falling edge— Triggers a reset operation when the Reset input does one of the following:Falls from a positive value to a negative value or zero
Falls from zero to a negative value, where the fall is not a continuation of a fall from a positive value to zero
Either edge— Triggers a reset operation when the Reset input is aRising edgeorFalling edgeNon-zero sample— Triggers a reset operation at each sample time that the Reset input is not zero
To disable the reset port, set Reset port to
None.
Dependencies
To enable this port, set Reset port to any
option other than None.
Data Types: single | double
Output
Parameters
Block Characteristics
Data Types |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Algorithms
The RLS filter is expressed in matrix form as
where λ−1 denotes the reciprocal of the exponential weighting factor.
The variables are as follows:
| Variable | Description |
|---|---|
n | The current time index |
u(n) | The vector of buffered input samples at step n |
P(n) | The inverse covariance matrix at step n |
k(n) | The gain vector at step n |
The vector of filter-tap estimates at step n | |
y(n) | The filtered output at step n |
e(n) | The estimation error at step n |
d(n) | The desired response at step n |
λ | The forgetting factor |
The implementation of the algorithm in the block is optimized by exploiting the symmetry of the inverse covariance matrix P(n). This decreases the total number of computations by a factor of two.
References
[1] Hayes, M.H. Statistical Digital Signal Processing and Modeling. New York: John Wiley & Sons, 1996.
Extended Capabilities
Version History
Introduced before R2006a