xelim
Description
rsys = xelim(sys,elim)sys by eliminating the states
specified in the vector elim. The full state vector
x is partitioned as x =
[x1;x2]
where x1 is the reduced state vector and
x2 is eliminated.
This function is useful to eliminate states known to settle quickly (fast modes) or
contribute little to the input/output map. When you don’t know which states to eliminate,
use reducespec and
the model-order reduction workflow.
Examples
Consider the following continuous fourth-order model.
To reduce its order, first compute a balanced state-space realization with balreal.
h = tf([1 11 36 26],[1 14.6 74.96 153.7 99.65]); [hb,g] = balreal(h);
Examine the Gramians.
g'
ans = 1×4
0.1394 0.0095 0.0006 0.0000
The last three diagonal entries of the balanced Gramians are relatively small. Eliminate these three least-contributing states with xelim, using both matched DC gain and direct-deletion methods.
hmdc = xelim(hb,2:4,"MatchDC"); hdel = xelim(hb,2:4,"Truncate");
Both hmdc and hdel are first-order models. Compare their Bode responses against that of the original model.
bp = bodeplot(h,hmdc,'r--',hdel,'k-.'); bp.PhaseMatchingEnabled = 'on'; legend("Original","State elimination (match DC)",... "State elimination (truncate)");

The reduced-order model hdel is clearly a better frequency-domain approximation of h. Now compare the step responses.
stepplot(h,hmdc,'r--',hdel,'k-.') legend("Original","State elimination (match DC)",... "State elimination (truncate)",Location="southeast");
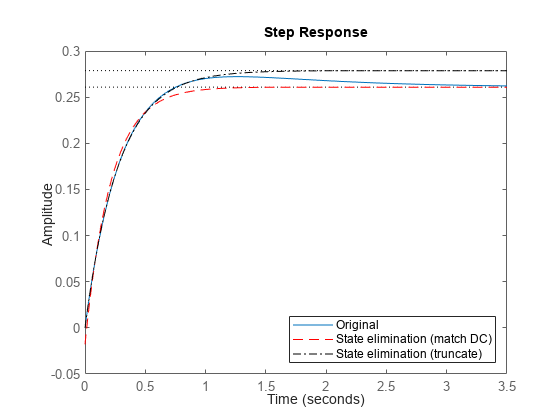
While hdel accurately reflects the transient behavior, only hmdc gives the true steady-state response.
For faster and more accurate results, use reducespec for model reduction workflows.
Since R2024a
This example shows how to use findop to find the matching initial condition for a reduced model obtained with xelim.
Create a random state-space model.
rng(0) sys = rss(10,1,2);
To reduce its order, first compute a balanced state-space realization with balreal.
[sysb,g] = balreal(sys); g'
ans = 1×10
13.2301 4.9468 1.0334 0.4597 0.0644 0.0287 0.0057 0.0007 0.0000 0.0000
Based on the small Gramians, you can eliminate last 6 states from balanced realization sysb.
rsys = xelim(sysb,5:10,"MatchDC");With MatchDC option, the reduced model states may differ from because xelim scales and sometimes transforms the states to obtain the reduced model. Therefore, the initial conditions of the original model and reduced model may be different.
Compute the initial condition of the original and reduced models.
op = findop(sysb,u=[1 -1]); opr = findop(rsys,u=[1 -1]); op.x(1:4)
ans = 4×1
18.9852
-3.2735
1.6693
0.5918
opr.x
ans = 4×1
18.9852
-3.2735
0.8347
0.5918
The initial states for both models are different. Therefore, it is recommended to recompute the operating condition when reducing models. Using operating conditions of the original model with the reduced model may result in incorrect responses. For example, compare the initial response of the reduced model with the operating condition from the original model.
t = 0:0.01:5; y = initial(sysb,op.x,t); y1 = initial(rsys,op.x(1:4),t); y2 = initial(rsys,opr.x,t); plot(t,y,t,y1,'k:',t,y2,'r--') legend("Original","Reduced (original IC)", "Reduced (recomputed IC)");

Input Arguments
Output Arguments
Algorithms
Version History
Introduced in R2023b