Design. Simulate. Deploy.
Simulink is a block diagram environment used to design systems with multidomain models, simulate before moving to hardware, and deploy without writing code.
Have questions? Contact Sales.
Simulink is a block diagram environment used to design systems with multidomain models, simulate before moving to hardware, and deploy without writing code.
Have questions? Contact Sales.
To transform development of complex systems, market-leading companies adopt Model-Based Design by systematically using models throughout the entire process.

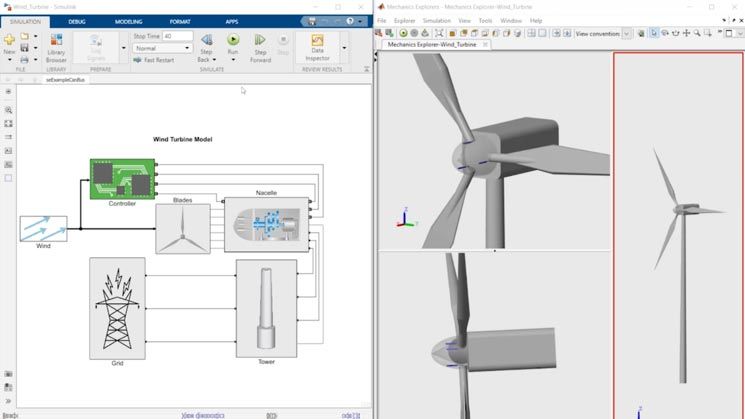
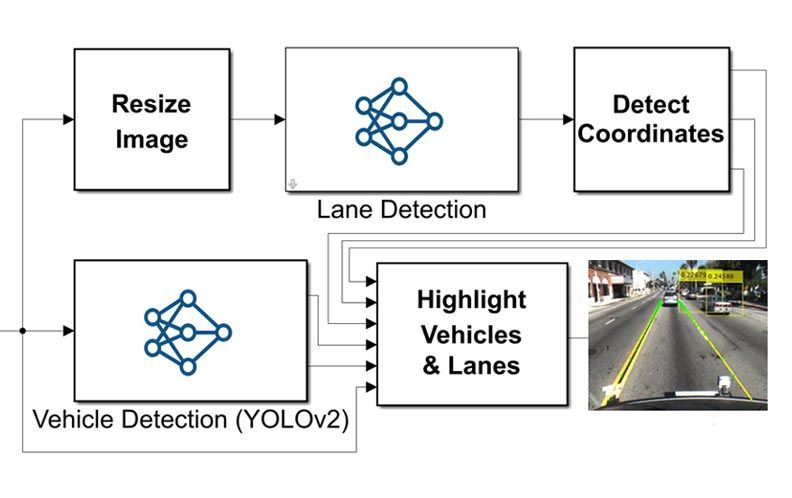
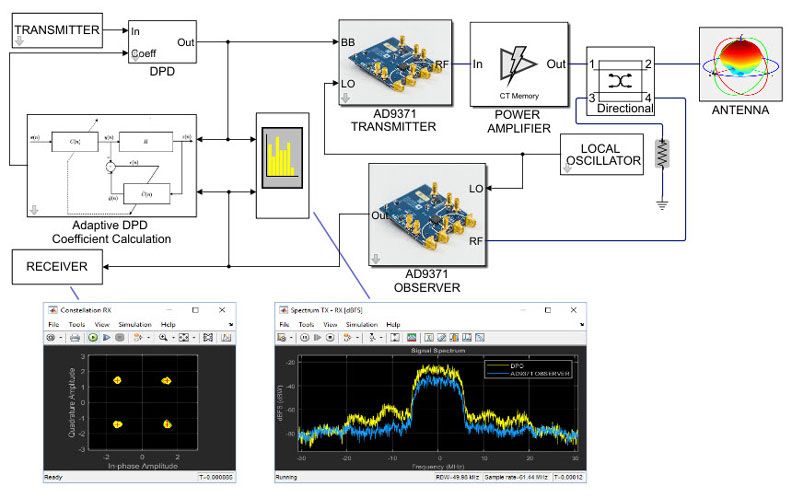
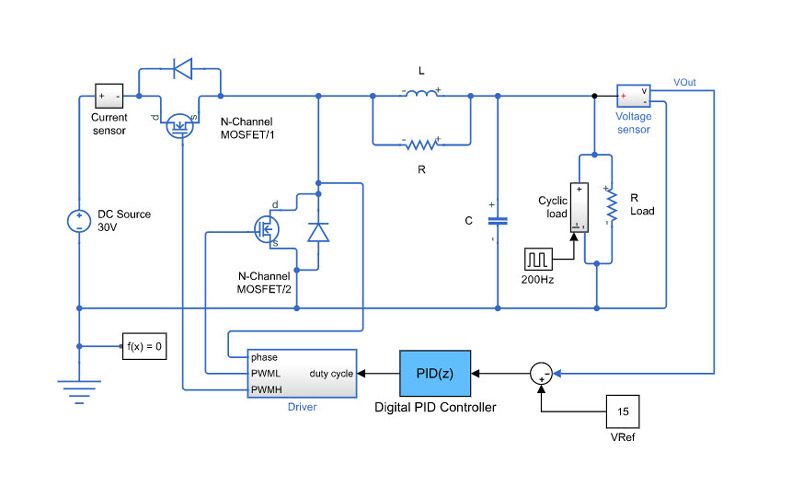
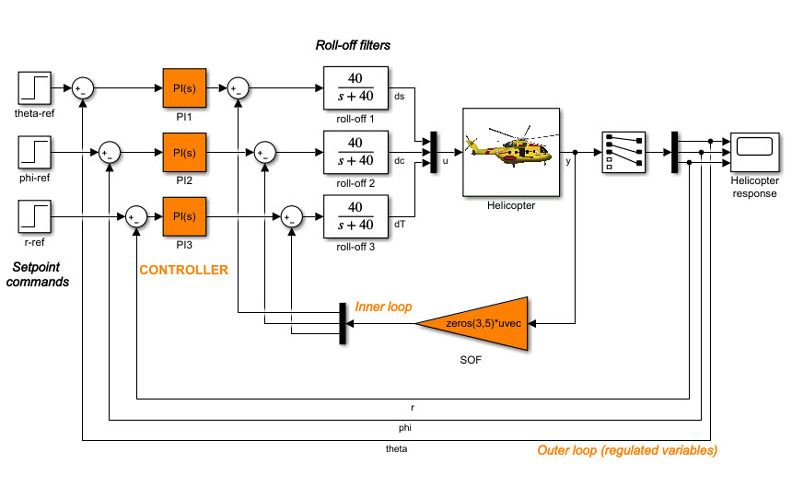
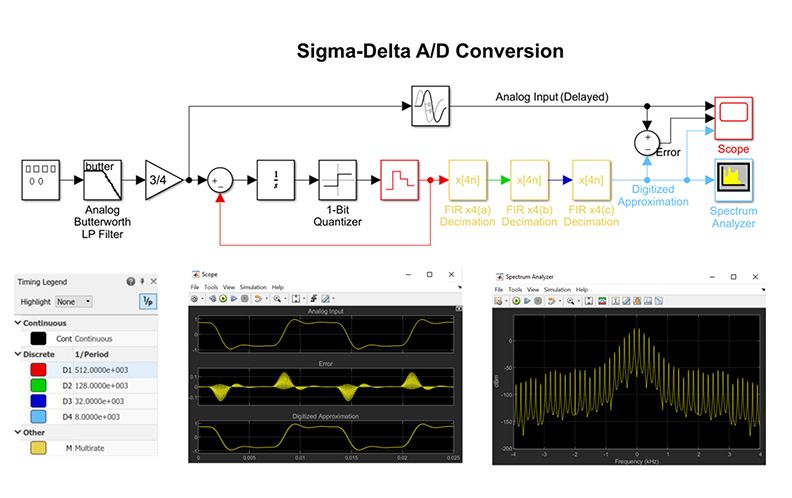
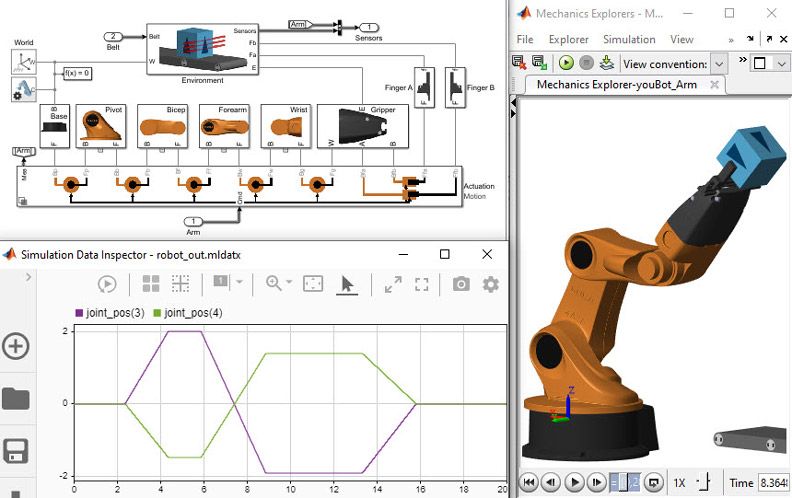
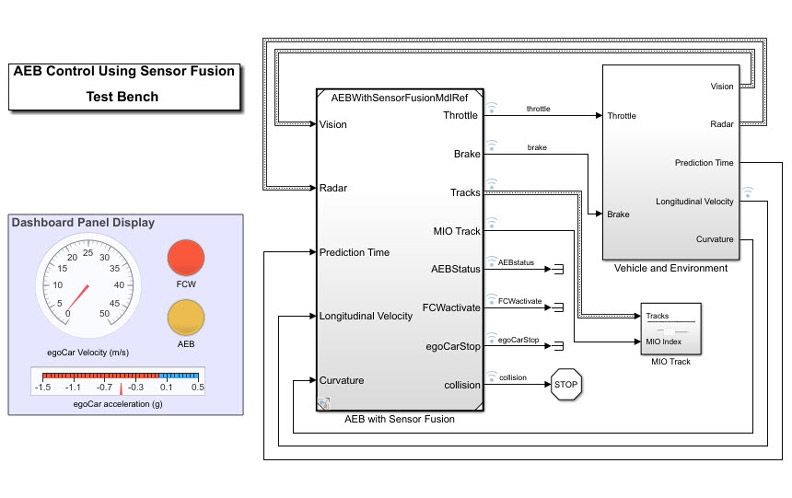
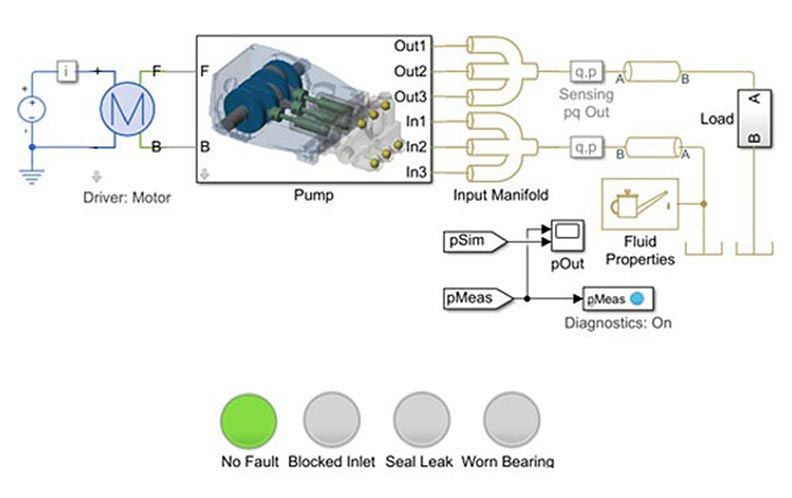
Explore a wide design space and test your systems early with multidomain modeling and simulation.

Model-based systems engineering (MBSE) is the application of models to support the full system lifecycle. Simulink bridges development from requirements and system architecture to detailed component design, implementation, and testing.
Agile software development helps teams deliver value to their customers faster using short iteration cycles with an emphasis on continuous integration and team collaboration. Simulation, automated testing, and code generation shorten the development cycle, enabling you to become a successful Agile team.


Use MATLAB and Simulink together to combine the power of textual and graphical programming in one environment.
Apply your MATLAB knowledge to:

“Simulink is particularly helpful in two stages of our development process. Early on, it helps us try new ideas and visualize how they will work. After generating code and conducting in-vehicle tests, we can run multiple simulations, refine the design, and regenerate code for the next iteration.”
Jonny Andersson, Scania

Use Simulink through your web browser.
You can also select a web site from the following list
Americas
Europe
Asia Pacific