Perform XCP Data Acquisition in Simulink
This example shows you how to use XCP blocks to acquire measurement values in Simulink® from the XCP Sample server.
Vehicle Network Toolbox™ provides XCP blocks for interfacing with a server over multiple transport layers including CAN, CAN FD and UDP. This example uses the XCP CAN Configuration, XCP CAN Data Acquisition, and XCP CAN Transport Layer blocks to perform data transfer over the CAN protocol.
XCP is a high-level protocol used for accessing and modifying internal parameters and variables of a model, algorithm, or ECU. For more information, refer to the ASAM standards.
Open the A2L File
An A2L file is required to establish a connection to the XCP server. The A2L file describes all of the functionality and capability that the XCP server provides, as well as the details of how to connect to the server. Use the xcpA2L function to open the A2L file that describes the server model.
a2LInfo = xcpA2L("SampleECU.a2l")a2LInfo =
A2L with properties:
File Details
FileName: 'SampleECU.a2l'
FilePath: '/tmp/Bdoc26a_3233028_2250929/tp5f6ebb1e/vnt-ex11419635/SampleECU.a2l'
ServerName: 'SampleServer'
Warnings: [0×0 string]
Parameter Details
Events: {'Event DAQ 100ms'}
EventInfo: [1×1 xcp.a2l.Event]
Measurements: {'Line' 'PWM' 'Sine'}
MeasurementInfo: [3×1 containers.Map]
Characteristics: {'Gain' 'yData'}
CharacteristicInfo: [2×1 containers.Map]
AxisInfo: [1×1 containers.Map]
RecordLayouts: [3×1 containers.Map]
CompuMethods: [1×1 containers.Map]
CompuTabs: [0×1 containers.Map]
CompuVTabs: [0×1 containers.Map]
XCP Protocol Details
ProtocolLayerInfo: [1×1 xcp.a2l.ProtocolLayer]
DAQInfo: [1×1 xcp.a2l.DAQ]
TransportLayerCANInfo: [1×1 xcp.a2l.XCPonCAN]
TransportLayerUDPInfo: [0×0 xcp.a2l.XCPonIP]
TransportLayerTCPInfo: [1×1 xcp.a2l.XCPonIP]
Start the XCP Sample Server
The XCP Sample server mimics the behavior of a real XCP server in a controlled way. In this case, it serves ONLY for examples with limited functionalities. Use SampleECU to create a sample server object in the MATLAB® workspace.
sampleServer = SampleECU(a2LInfo,"CAN","MathWorks","Virtual 1",1);
Open the Example Model
open_system("XCPDataAcquisitionInSimulinkExample.slx")Set Up XCP Block Parameters
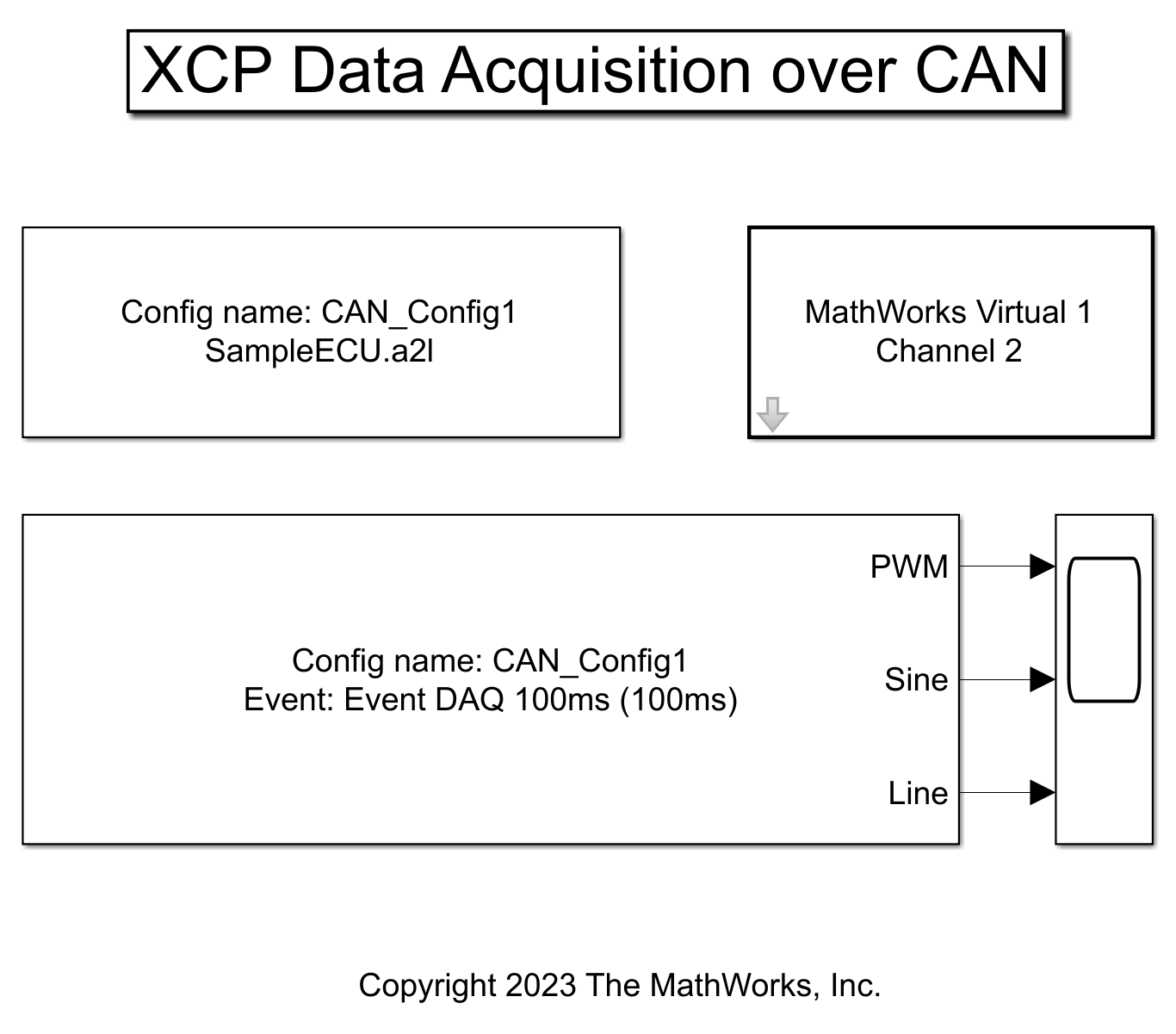
Create a model to set up XCP data acquisition from the sample server for the measurements: PWM, Sine, and Line.
Use an XCP Configuration block and select the A2L file,
SampleECU.a2l.Use an XCP CAN Transport Layer block and set the
DevicetoMathworks Virtual 1 Channel 2. The transport layer is configured to transfer XCP messages over CAN via the specified virtual channel.Use XCP Data Acquisition blocks to receive selected measurements at specified events. For this example, select an XCP Data Acquisition block for all three measurements.
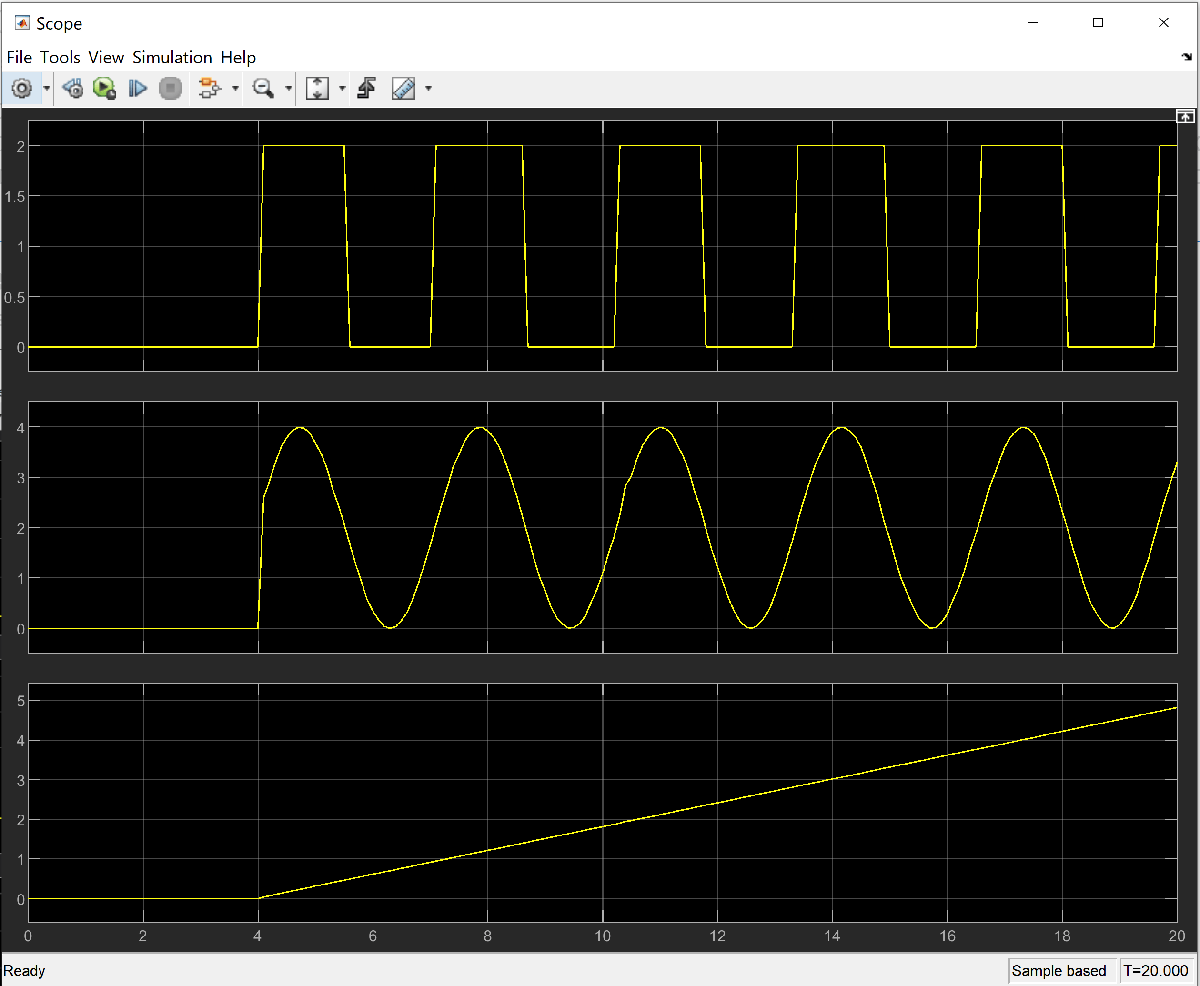
Visualize Measurement Values Received from Server
Run the model and plot the results to see the measurement values for PWM, Sine and Line. The X-axis corresponds to the simulation timestep. Initially the scope has no data output as the Sample server requires time to initialize.
You can view the signals in the Scope, or in the Simulation Data Inspector by selecting the signals of interest.
Close the Model and Clean Up
close_system("XCPDataAcquisitionInSimulinkExample.slx") clear sampleServer a2LInfo