Video Mosaicking
This example shows how to create a mosaic from a video sequence. Video mosaicking is the process of stitching video frames together to form a comprehensive view of the scene. The resulting mosaic image is a compact representation of the video data. The Video Mosaicking block is often used in video compression and surveillance applications.
This example illustrates how to use the Corner Detection block, the Estimate Geometric Transformation block, the Projective Transform block, and the Compositing block to create a mosaic image from a video sequence.
Example Model
The following figure shows the Video Mosaicking model:
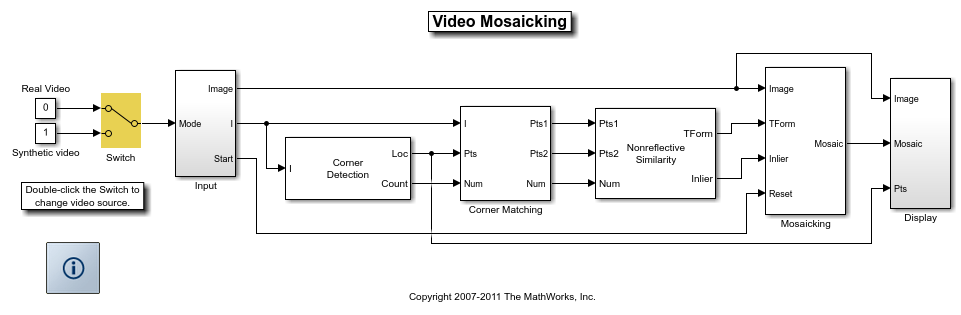
The Input subsystem loads a video sequence from either a file, or generates a synthetic video sequence. The choice is user defined. First, the Corner Detection block finds points that are matched between successive frames by the Corner Matching subsystem. Then the Estimate Geometric Transformation block computes an accurate estimate of the transformation matrix. This block uses the RANSAC algorithm to eliminate outlier input points, reducing error along the seams of the output mosaic image. Finally, the Mosaicking subsystem overlays the current video frame onto the output image to generate a mosaic.
Input Subsystem
The Input subsystem can be configured to load a video sequence from a file, or to generate a synthetic video sequence.

If you choose to use a video sequence from a file, you can reduce computation time by processing only some of the video frames. This is done by setting the downsampling rate in the Frame Rate Downsampling subsystem.
If you choose a synthetic video sequence, you can set the speed of translation and rotation, output image size and origin, and the level of noise. The output of the synthetic video sequence generator mimics the images captured by a perspective camera with arbitrary motion over a planar surface.
Corner Matching Subsystem
The subsystem finds corner features in the current video frame in one of three methods. The example uses Local intensity comparison (Rosen & Drummond), which is the fastest method. The other methods available are the Harris corner detection (Harris & Stephens) and the Minimum Eigenvalue (Shi & Tomasi).
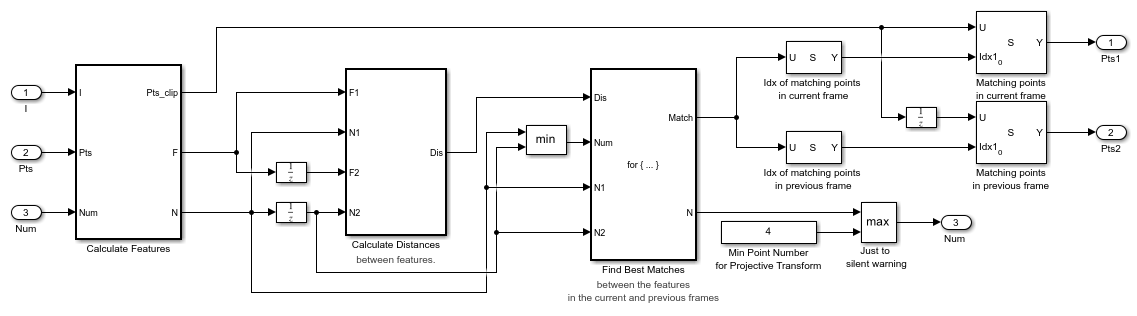
The Corner Matching Subsystem finds the number of corners, location, and their metric values. The subsystem then calculates the distances between all features in the current frame with those in the previous frame. By searching for the minimum distances, the subsystem finds the best matching features.
Mosaicking Subsystem
By accumulating transformation matrices between consecutive video frames, the subsystem calculates the transformation matrix between the current and the first video frame. The subsystem then overlays the current video frame on to the output image. By repeating this process, the subsystem generates a mosaic image.

The subsystem is reset when the video sequence rewinds or when the Estimate Geometric Transformation block does not find enough inliers.
Video Mosaicking Using Synthetic Video

The Corners window shows the corner locations in the current video frame.

The Mosaic window shows the resulting mosaic image.

Video Mosaicking Using Captured Video
The Corners window shows the corner locations in the current video frame.

The Mosaic window shows the resulting mosaic image.
