pcfitplane
Fit plane to 3-D point cloud
Syntax
Description
model = pcfitplane(ptCloudIn,maxDistance)
This function uses the M-estimator SAmple Consensus (MSAC) algorithm to find the plane. The MSAC algorithm is a variant of the RANdom SAmple Consensus (RANSAC) algorithm.
model = pcfitplane(ptCloudIn,maxDistance,referenceVector)referenceVector input.
model = pcfitplane(ptCloudIn,maxDistance,referenceVector,maxAngularDistance)
[
additionally returns the linear indices to the inlier and outlier points in the
point cloud input.model,inlierIndices,outlierIndices]
= pcfitplane(___)
[___,
additionally returns the mean error of the distance of inlier points to the
model, using any of the preceding syntaxes.meanError] =
pcfitplane(___)
[___] = pcfitplane(___,
specifies options using one or more name-value arguments in addition to any
combination of arguments from previous syntaxes. For example,
Name=Value)pcfitplane(ptCloud,maxDistance,referenceVector,maxAngularDistance,Confidence=95)
sets the confidence percentage for finding maximum number of inlier to
95.
Examples
Detect Multiple Planes from Point Cloud
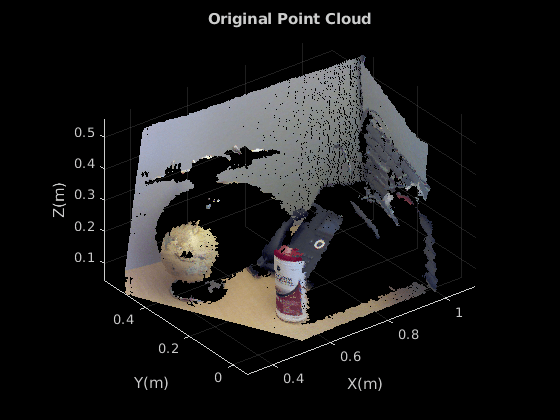
Load the point cloud.
load("object3d.mat")Display the point cloud and label the figure.
figure pcshow(ptCloud) xlabel("X(m)") ylabel("Y(m)") zlabel("Z(m)") title("Original Point Cloud")
Set the maximum point-to-plane distance (2cm) for plane fitting.
maxDistance = 0.02;
Set the normal vector of the plane.
referenceVector = [0,0,1];
Set the maximum angular distance to 5 degrees.
maxAngularDistance = 5;
Detect the first plane, the table, and extract it from the point cloud.
[model1,inlierIndices,outlierIndices] = pcfitplane(ptCloud,...
maxDistance,referenceVector,maxAngularDistance);
plane1 = select(ptCloud,inlierIndices);
remainPtCloud = select(ptCloud,outlierIndices);Set the region of interest to constrain the search for the second plane, left wall.
roi = [-inf,inf;0.4,inf;-inf,inf]; sampleIndices = findPointsInROI(remainPtCloud,roi);
Detect the left wall and extract it from the remaining point cloud.
[model2,inlierIndices,outlierIndices] = pcfitplane(remainPtCloud,...
maxDistance,SampleIndices=sampleIndices);
plane2 = select(remainPtCloud,inlierIndices);
remainPtCloud = select(remainPtCloud,outlierIndices);Plot the two planes and the remaining points.
figure
pcshow(plane1)
title("First Plane")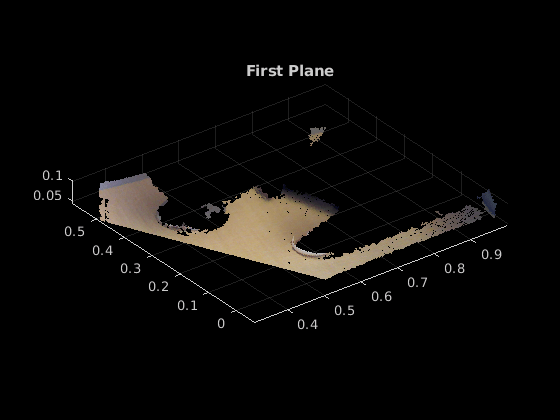
figure
pcshow(plane2)
title("Second Plane")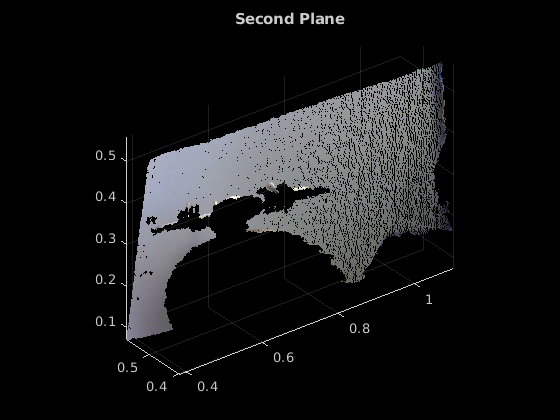
figure
pcshow(remainPtCloud)
title("Remaining Point Cloud")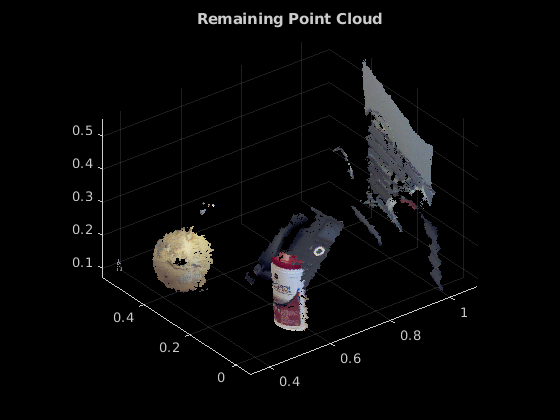
Input Arguments
Output Arguments
References
[1] Torr, P. H. S., and A. Zisserman. “MLESAC: A New Robust Estimator with Application to Estimating Image Geometry.” Computer Vision and Image Understanding. 2000.
Extended Capabilities
Version History
Introduced in R2015b
See Also
Objects
Functions
pcshow|pcwrite|pcread|pcfitsphere|pcfitcylinder|findPointsInROI|pcmerge|pctransform|pcregistericp|pcdenoise
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)