Synchronous Machine State-Space Control
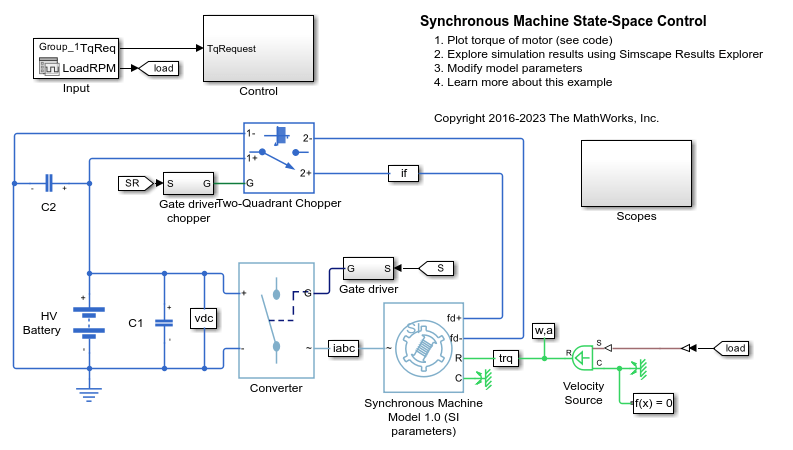
This example shows how to control currents in a synchronous machine (SM) based traction drive using state-space control. A high-voltage battery feeds the SM through a controlled three-phase converter for the stator windings and through a controlled two-quadrant chopper for the rotor winding. An ideal angular velocity source provides the load. The SM operates below the base speed. At each sample instant, the torque request is converted to relevant current references using the zero d-axis control approach. A state-feedback controller controls the currents in the rotor reference frame. A Luenberger observer obtains the velocity-dependent feedforward pre-control terms. The simulation uses several torque steps in both motor and generator modes. The task scheduling is implemented as a Stateflow® state machine. The Scopes subsystem contains scopes that allow you to see the simulation results.
Model
Simulation Results from Simscape Logging
The plot below shows the requested and measured torque for the test, as well as the phase currents in the electric drive.

You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)