Four Coupled 66-kV Cables
This example compares the steady state and transient responses of two different cable designs whose R L C parameters are calculated using the Power Cable Parameters app.
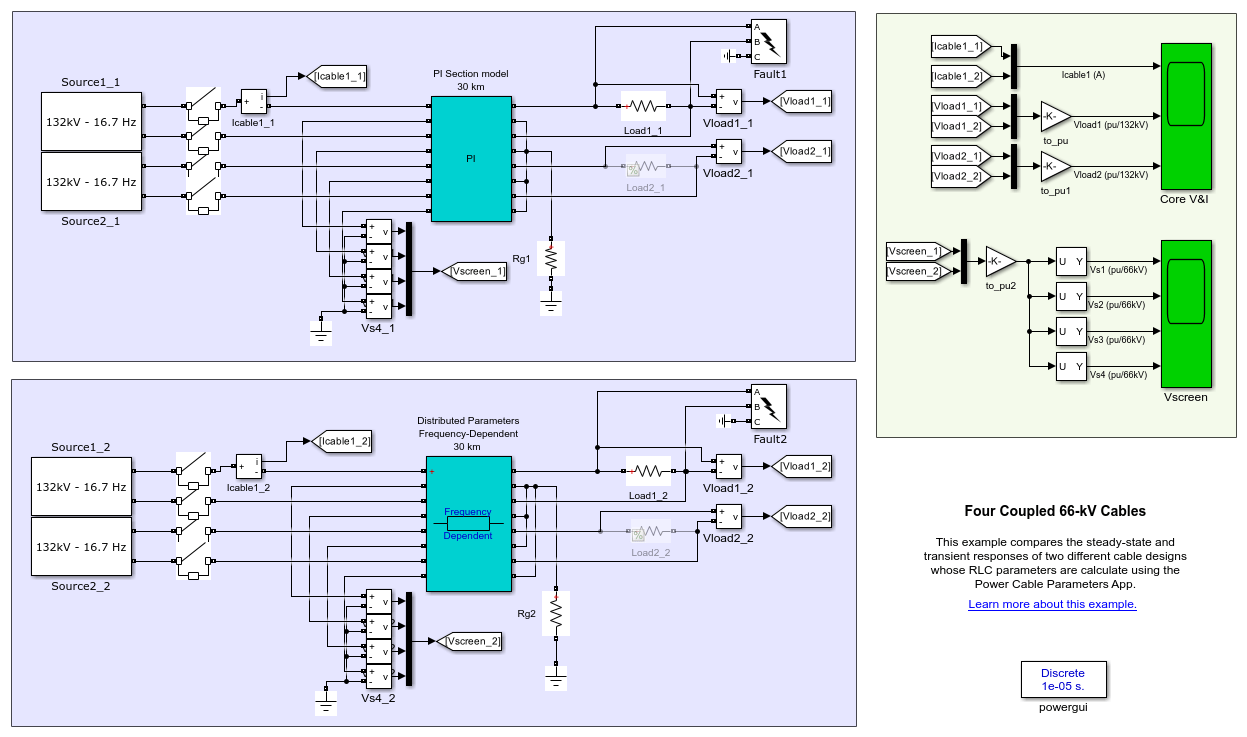
Description
A set of four 66-kV 30-km cables is used to transmit power to two 132-kV 50-MW resistive loads at 16.7 Hz. Only Load1 is connected at cable1-cable2 receiving end, while cable3-cable4 receiving end is left open (Load2 commented out). Screen conductors are grounded on the receiving end only.
Cables are buried at 2m depth, and they are arranged in a horizontal flat configuration. To see detailed geometric parameters of this cable system, select Edit geometry parameters in the Distributed-Parameters Frequency-Dependent block menu. This will open the Power Cable Parameters App which has been used to compute the R L C 8x8 matrices of this cable system (8 conductors). Conductors 1 3 5 7 are phase conductors, conductors 2 4 6 8 are sheath conductors (screens).
The RLC matrices computed at nominal frequency (16.7 Hz) are used by the PI Section block. The 400 RLC matrices computed for a frequency range 10e-4 to 10e5 Hz are used to fit the Frequency-Dependent cable model (Distributed-Parameters block). Computed RLC matrices and geometric parameters are stored in the DATA structure saved in the Param_4cablesUnderground2cond.mat file (available in Parameters/Load typical menu of the Power Cable Parameters App). These RLC matrices are automatically loaded in your workspace at model opening (see model Properties/ PreLoadFcn callback of the model)
This example requires the Optimization Toolbox™ Software.
Simulation
In order to compare transient response of the PI and Frequency-Dependent models, the following switching operations are performed:
t = 3.25 cycles: Energization of the four cables on infinite sources through four circuit breakers on the source side
t = 5 cycles: 2-cycle fault across Load1 (cable 1 - cable 2)
On the two Scopes notice that both models give same steady-state voltages and currents.
Zoom X around t=0.135 sec to compare phase and screen conductor voltage transients at cable energization. The PI Section is appropriate for steady state, but it does not reproduce the high frequency content of transient voltages. For example, Zooming on Vload2 waveform shows a damped sinusoidal oscillatory response for the PI section (yellow) whereas the Distributed-Parameters Frequency-Dependent model has a damped square-wave type response (blue). The propagation delay of the Distributed-Parameters line is clearly seen (delay ~ 150 us = time difference between the blue and yellow traces when voltage starts to increase at receiving end). The PI section model assuming constant RLC parameters evaluated at 16.7 Hz has a limited frequency response, whereas the Distributed-Parameters Frequency-Dependent model correctly represents a wide frequency range from DC to ~100 kHz.
Observe also voltages induced on screens. As expected, during fault, because of the flat cable configuration, a higher voltage is induced on screen 3 (~ 0.2 pu/66 kV) than on screen 4 (~ 0.1 pu/66 kV). This is because cable 4 is farther from cables 1 and 2 than cable 3.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)