Induction Machine Current Controller
Discrete-time induction machine current PI controller

Libraries:
Simscape /
Electrical /
Control /
Induction Machine Control
Description
The Induction Machine Current Controller implements discrete-time proportional-integral (PI) based induction machine current control in the rotor d-q reference frame. You typically use the Induction Machine Current Controller in a series of blocks that make up a control structure. For example, to convert the dq0 reference frame output voltage to voltage in an abc reference frame, connect the Induction Machine Current Controller to an Inverse Clarke Transform in the control structure.
Equations
The block uses the backward Euler discretization method.
Two PI current controllers that are implemented in the rotor reference frame produce the reference voltage vector:
and
where
, and are the d-axis and q-axis reference voltages, respectively.
, and are the d-axis and q-axis reference currents, respectively.
and are the d-axis and q-axis currents, respectively.
Kp_id, and Kp_iq are the proportional gains for the d-axis and q-axis controllers, respectively.
Ki_id and Ki_iq are the integral gains for the d-axis and q-axis controllers, respectively.
vd_FF, and vq_FF are the feedforward voltages for the d-axis and q-axis, respectively. The feedforward voltages are obtained from the machine mathematical equations and provided as inputs.
Ts, is the sample time of the discrete controller.
Voltage Saturation
Saturation is imposed when the stator voltage vector exceeds the voltage phase limit Vph_max:
where vd, and vq are the d-axis and q-axis voltages, respectively.
In the case of axis prioritization, the voltages v1 and v2 are introduced, where:
For d-axis prioritization — v1 = vd and v2 = vq.
For q-axis prioritization —v1 = vq and v2 = vd.
The constrained (saturated) voltages and are obtained as:
and
where:
and are the unconstrained (unsaturated) voltages.
v2_max is the maximum value of v2 that does not exceed the voltage phase limit. The equation that define v2_max is
In the case of d-q equivalence, the direct and quadrature axes have the same priority, and the constrained voltages are:
and
where:
and
Integral Anti-Windup
An anti-windup mechanism is employed to avoid the saturation of the integrator output. In such a situation, the integrator gains become:
and
where Kaw_id, Kaw_iq, and Kaw_if are the anti-windup gains for the d-axis, q-axis, and field controllers, respectively.
Assumptions and Limitations
The plant model for the direct and quadrature axes can be approximated with a first-order system.
Examples
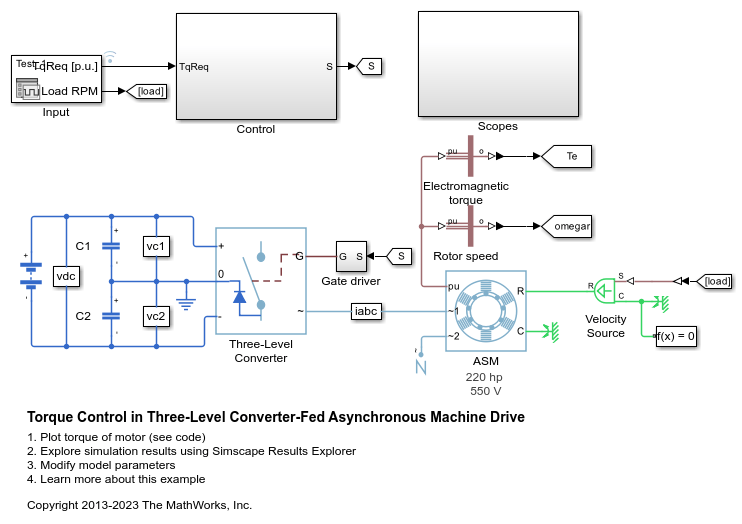
Torque Control in Three-Level Converter-Fed Asynchronous Machine Drive
Control the torque in an asynchronous machine (ASM) based electrical-traction drive. A high-voltage battery feeds the ASM through a three-phase three-level neutral-point clamped controlled converter. The ASM operates in both motoring and generating modes. An ideal angular velocity source provides the load. The Control subsystem uses the field-oriented control strategy to control the flux and torque. The current control is PI-based. A proportional controller regulates the neutral point voltage. The simulation uses several torque steps in both motor and generator modes. The Scopes subsystem contains scopes that allow you to see the simulation results.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2017b