Creating a Mobile Robot Using a MATLAB App
This example demonstrates how a multibody system can be built using an interactive MATLAB® app. In this example an application for exploring the design space of a multibody system is shown. The system here is a mobile manipulator with four omni-directional wheels.
MATLAB App Designer is used to build a GUI that allows the user to vary various parameters governing the mobile robot design, and to see an interactive visualization of the robot as the parameters are changed. It also has a button to create a Simulink® model based on the current design parameters.
Each parameter change triggers a call to the custom function makeMobileRobot.This is the top level function which calls different sub functions like createMobileRobotChassis, createOmniDirectionalWheel and createRobotArm to create and connect the various components of the mobile robot. Each of these custom functions use different classes and methods under the simscape.multibody.* namespace for building the different components.
We can also build this system by setting up the parameters directly in MATLAB in a programmatic way and then calling the function makeMobileRobot. Refer to the script buildMobileRobot.m to learn more.
To view the app run the following command:
openExample("sm/MobileRobotBuilderAppExample"); run("buildMobileRobotApp.mlapp");
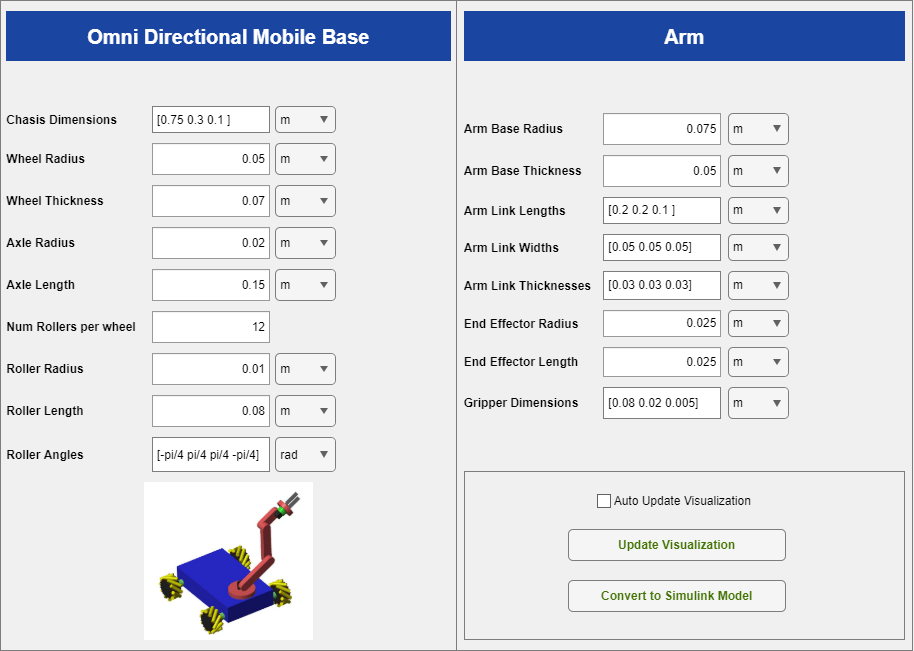
App Interface
