plotKinematicGraph
Class: simscape.multibody.CompiledMultibody
Namespace: simscape.multibody
Description
h = plotKinematicGraph(cmb)simscape.multibody.CompiledMultibody object, cmb, in a tree
layout graph. The dots in the plot indicate the component objects, such as simscape.multibody.Multibody, simscape.multibody.RigidBody, simscape.multibody.Solid, and simscape.multibody.WorldFrame, in the cmb object. The lines
between the dots indicate joint objects between component objects, and the arrow on each
line points toward the follower frame of each joint object. For example, the image shows the
kinematic graph of a four bar system.
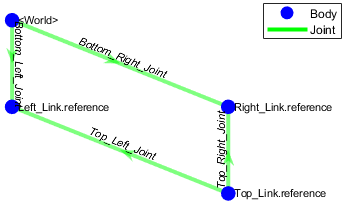
The blue dots indicate the Solid objects that represent the four bars,
the green lines indicate the simscape.multibody.RevoluteJoint objects that represent the joints between each
pair of bars, and the arrow on each line points toward the follower frame of each
RevoluteJoint object. See the Creating a Four Bar Multibody Mechanism in MATLAB example for more information
about the four bar system.
h = plotKinematicGraph(cmb,Name=Value)Name,Value arguments to specify the
layout of the graph.
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2022a