Communicate with Hardware Using Connected IO
You can use Connected IO to communicate with the IO peripherals on the hardware.
Simulation with Connected IO is an intermediate step in the Model-Based Design workflow that bridges the gap between simulation and code generation by enabling Simulink® to communicate with the hardware before deploying the model on the hardware. Connected IO enables you to modify your model design and monitor the effect of the modified design using peripheral data from the hardware in a near real-time environment. You are not required to deploy the model on the hardware to monitor the effect of the modified design, which accelerates the simulation process. This interaction between Simulink (software) and Raspberry Pi® (hardware) is possible only when you enable Connected IO.
These sections explain:
Raspberry Pi Blocks Supporting Connected IO
The Connected IO described here applies to the Simulink Support Package for Raspberry Pi Hardware on these Raspberry Pi blocks:
Source blocks: Without Connected IO, these source blocks output zero during Normal mode simulation. With Connected IO, these blocks read data from the peripherals of the hardware.
Sink blocks: Without Connected IO, these sink blocks do not have any role during Normal mode simulation. With Connected IO, these blocks write data to the peripherals of the hardware.
Source Blocks Sink Blocks
How Connected IO Works
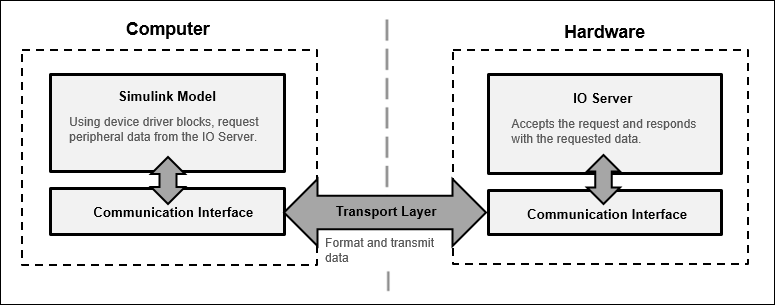
Connected IO creates a communication interface that enables the Simulink model and the IO Server to communicate with each other. The Simulink model resides in your computer, and the IO Server is an engine on the hardware that contains all the peripheral functions. The transport layer formats and transmits the data using the communication interface.
This diagram shows the connection that the Connected IO creates between your computer and the hardware.
Communication in Connected IO
When you simulate a Simulink model with Connected IO:
The device driver blocks (for example, GPIO Read and GPIO Write blocks) in the model request peripheral data from the IO Server.
The IO Server accepts the request and responds with the requested data. You can use any Simulink sink or dashboard block to view the received data. Using the peripheral data received, you can verify that your model design meets the requirements.
If necessary, you can modify the design by adding, removing, or replacing any block in the Simulink model.
After the model is modified, resimulate the model. During simulation, the data request from the model is communicated to the hardware. You can continue to modify and simulate the model until the expected behavior is achieved.
Note
The communication in Connected IO is an on-demand process. The hardware sends data only when receiving a data request from the Simulink model.
You do not have to build, deploy, and run the model on the hardware to monitor the effects of your changes in your model design.
Connected IO in Model-Based Design
When you simulate a model without Connected IO, Simulink does not communicate with the hardware. Simulink communicates with the hardware only when the code is generated and the model is deployed on the hardware in External mode. Connected IO is an intermediate step in the model-based design workflow that bridges the gap between simulation and code generation by enabling Simulink to communicate with the hardware before deploying the model on the hardware.
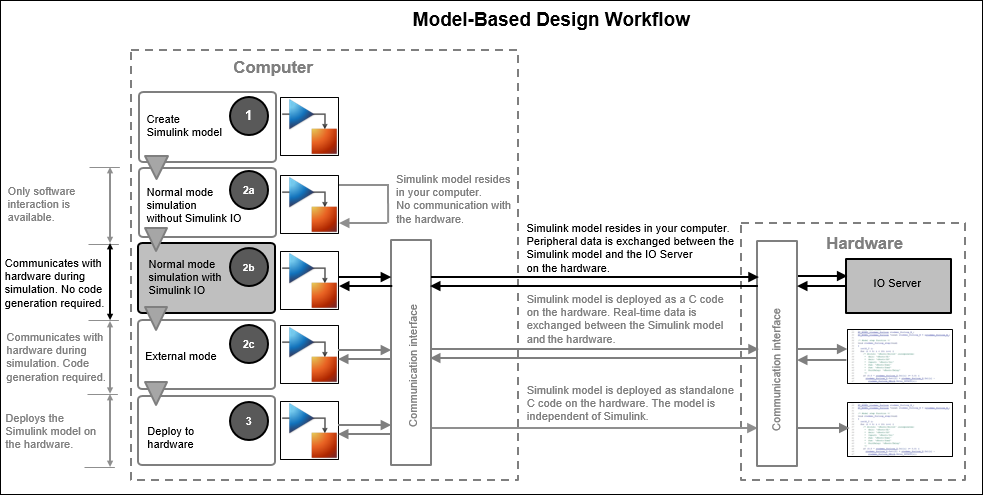
This Model-Based Design Workflow diagram displays a model-based workflow:
Create a Simulink model.
Simulate the model in:
Simulation without Connected IO: There is no hardware interaction and no code generation.
Simulation with Connected IO: The model communicates with the hardware. There is no code generation.
External mode (Monitor & Tune): The model is deployed on the hardware and generates code.
Deploy the model to the hardware.
Model-Based Design Workflow
How Connected IO Differs from External Mode
Connected IO and External mode both enable you to communicate with the hardware during simulation. However, you use Connected IO and External mode for different purposes. The table shows the actions that you can perform with each mode.
| Action | External Mode | Connected IO |
|---|---|---|
| Obtain real-time data | You can obtain real-time data with External mode. | Enable the Simulation Pacing Options to get near real-time data. |
| Timing analysis of real-time data | Timing analysis of real-time data is possible because the Simulink model is running on the hardware in real-time. | Timing analysis of real-time data is not possible because the Simulink model is running in your computer and not on the hardware. |
| Time required to start simulation | 1-2 minutes | Few seconds |
| Code generation | Code is generated on the hardware. | No code is generated. |
Run Simulink Model in Connected IO
Follow these steps to run a Simulink model in connected IO mode:
Open a Simulink model.
On the Modeling tab of the model, select Model Settings.
In the Configuration Parameters dialog box, select Hardware Implementation from the left pane and select the target hardware in the Hardware board parameter.
On the Hardware tab of the model, in the Mode section, select
Connected IOand then click Run with IO.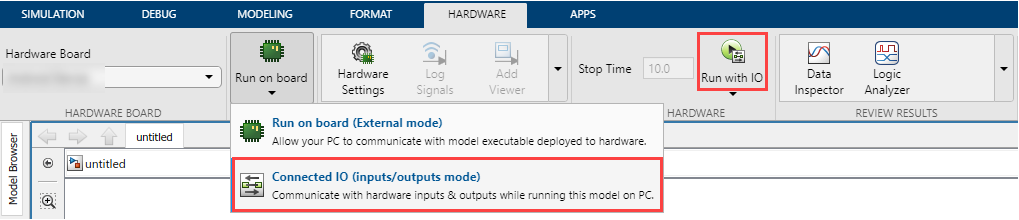
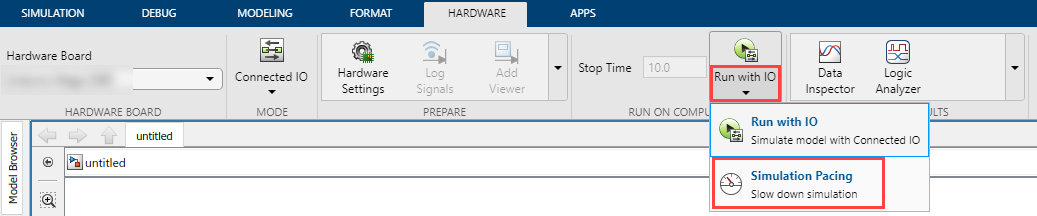
Additionally, you can change the rate of simulation by enabling simulation pacing. For more information, see Simulation Pacing Options.
See Also
Implement Connected I/O to Communicate with External Peripheral Devices Using Raspberry Pi