Linearize a Plant Model for Use in Feedback Control Design
This example shows how you can linearize a hydraulic plant model to support control system stability analysis and design.
Depending on the software you have available, use the appropriate sections of this example to explore various linearization and analysis techniques.
Explore the Model
To open the Hydraulic Actuator with Digital Position Controller example model, type:
openExample('simscape/HydraulicActuatorWithDigitalPositionControllerExample')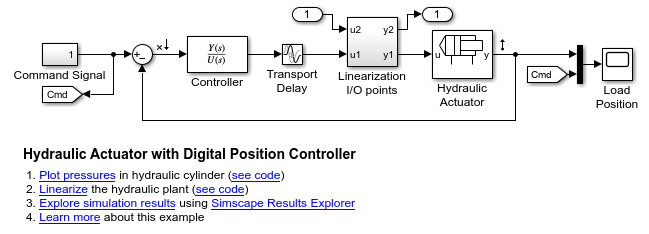
The model represents a two-way valve acting in a closed-loop circuit together with a double-acting cylinder. Double-click the Hydraulic Actuator subsystem to see the model configuration.

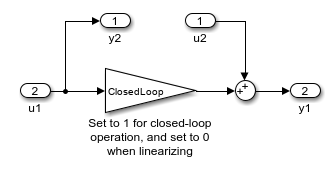
The controller is represented as a continuous-time transfer function plus a transport delay that allows for computational time and a zero-order hold when implemented in discrete time. The Linearization I/O points subsystem lets you easily break and restore the feedback control loop by setting the base workspace variable ClosedLoop to 0 or 1, respectively.
You can quickly generate and view the small-signal frequency response by clicking
the Linearize hyperlink in model annotation. To view the
MATLAB® script that generates the frequency response, click the next hyperlink
in that annotation, see code. This documentation provides
background information and alternative ways of linearization based on the software
you have.
In general, to obtain a nontrivial linearized input-output model and generate a frequency response, you must specify model-level inputs and outputs. The Hydraulic Actuator with Digital Position Controller model meets this requirement in two ways, depending on how you linearize:
Simulink® requires top- or model-level input and output ports for linearization with
linmod. The model has such ports, markedIn1andOut1.Simulink Control Design™ software requires that you specify input and output signal lines with linearization points. The specified lines must be Simulink signal lines, not Simscape™ physical connection lines. The model has such linearization points specified. For more information on using Simulink Control Design software for trimming and linearization, see documentation for that product.
Open the Load Position scope and simulate the model in a normal closed-loop controller configuration.

You can see that the model has a quasi-linear steady-state response between 2 and 3 seconds, when the two-way valve is open. Therefore, the state at 2.5 seconds is an operating point suitable for linearization.
Trim Using the Controller and Linearize with Simulink linmod Function
Set the controller parameters.
To specify sample time for controller discrete-time implementation, type the following in the MATLAB Command Window:
ts = 0.001;
To specify continuous-time controller numerator and denominator, type:
num = -0.5; den = [1e-3 1];
Find an operating point by running closed-loop and selecting the state at 2.5 seconds when the custom two-way valve is open.
To close the feedback loop, type:
assignin('base','ClosedLoop',1);To simulate the model and save the operating point information in the form of a state vector X and input vector U, type:
[t,x,y] = sim('HydraulicActuatorWithDigitalPositionController'); idx = find(t>2.5,1); X = x(idx,:); U = y(idx);Linearize the model using the Simulink
linmodfunction.To break the feedback loop, type:
assignin('base','ClosedLoop',0);To linearize the model, type:
[a,b,c,d] = linmod('HydraulicActuatorWithDigitalPositionController',X,U);Close the feedback loop by typing:
assignin('base','ClosedLoop',1);To generate a Bode plot with negative feedback convention, type the following in the MATLAB Command Window:
c = -c; d = -d; npts = 100; w = logspace(-3,5,npts); G = zeros(1,npts); for i = 1:npts G(i) = c*(1i*w(i)*eye(size(a))-a)^-1*b +d; end subplot(211), semilogx(w,20*log10(abs(G))) grid ylabel('Magnitude (dB)') subplot(212), semilogx(w,180/pi*unwrap(angle(G))) ylabel('Phase (degrees)') xlabel('Frequency (rad/s)') grid

Note
The linmod function provides only basic linearization
capabilities. For full linearization functionality, use Simulink
Control Design software. For more information, see Choose Linearization Tools (Simulink Control Design).
Linearize with Simulink Control Design Software
Note
To work through this section, you must have a Simulink Control Design license.
Simulink Control Design software has tools that help you find operating points and returns a state-space model object that defines state names. This is the recommended way to linearize Simscape models.
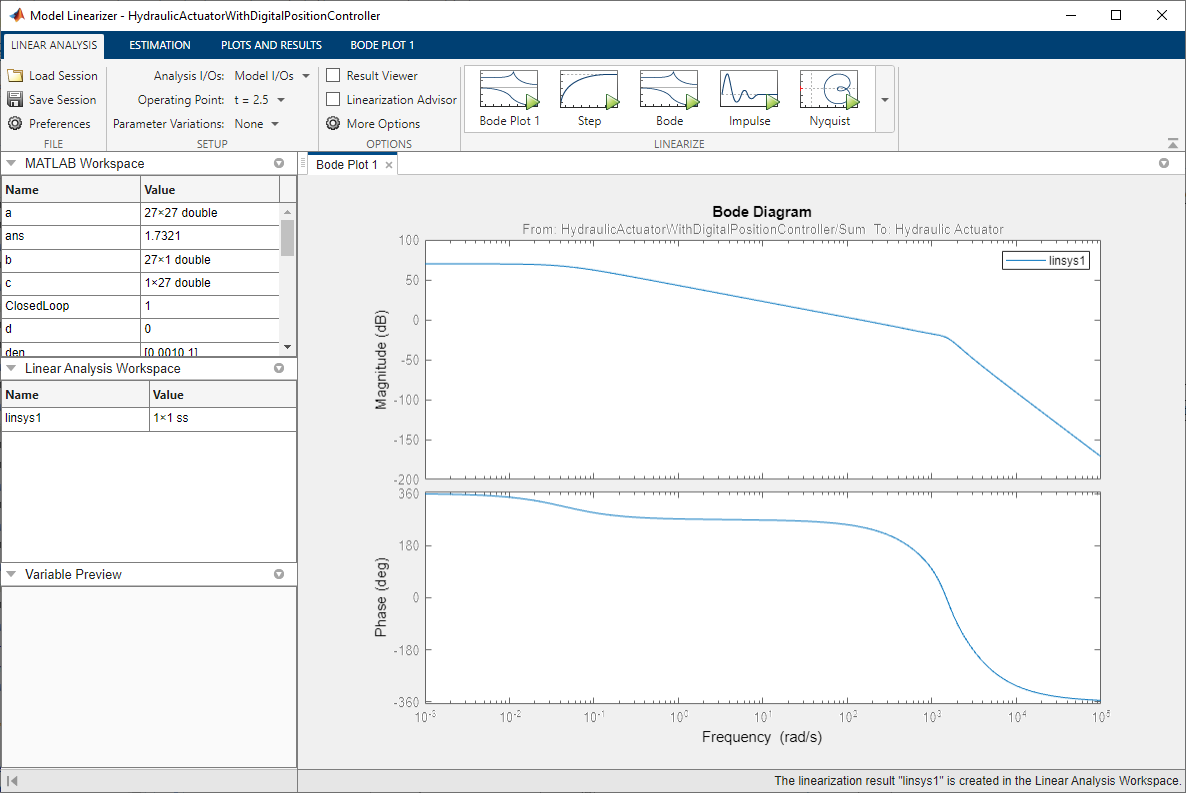
In the Simulink Toolstrip of the Hydraulic Actuator with Digital Position Controller model window, on the Apps tab, under Control Systems, click Model Linearizer.
In the Model Linearizer window, on the Linear Analysis tab, in the Operating Point drop-down list, select
Linearize At. Enter simulation snapshot time of2.5seconds and click OK.Click the Bode plot button.
For more information on using Simulink Control Design software for trimming and linearization, see the Simulink Control Design documentation.