Variable Inertia
Time-varying inertia specified as physical signal input

Libraries:
Simscape /
Driveline /
Inertias & Loads
Description
The Variable Inertia block represents the effect of a time-varying inertia. Components with variable inertia include satellites unfolding arrays of solar panels. A physical signal input port provides the instantaneous inertia at each time step throughout simulation. To minimize solver errors, avoid discontinuities and abrupt changes in the input signal.
As the component inertia changes, so does the inertial torque acting on that component:
where:
TI is the inertial torque.
I is the variable inertia.
ω is the angular velocity of the inertia.
The physical signal input saturates at the minimum inertia specified in the block property inspector. Whenever the input falls below the minimum inertia, the block performs its calculations on the minimum inertia instead. The inertial torque becomes:
where IMin is the minimum inertia allowed.
The angular momentum of the variable inertia is conserved. In the absence of external torques, a decrease in the moment of inertia leads to a proportional increase in angular velocity. The angular momentum remains constant until a net external torque causes it to change.
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see Modify Nominal Values for a Block Variable.
Examples
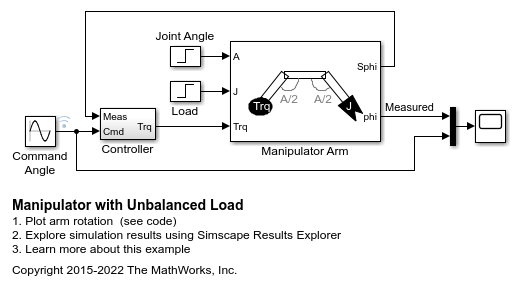
Manipulator with Unbalanced Load
A manipulator controlling the orientation of an end effector through an unbalanced arm. The motor is represented as a torque source using simple proportional control. The load on the end effector increases sharply when the end effector secures the load. Noise is introduced at each sensor to measure its effect on controller performance.
Ports
Input
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2015b