dmplot
(Not recommended) Interpret disk gain and phase margins
dmplot is not recommended. Use
diskmarginplot instead.
Syntax
dmplot dmplot(diskgm)
[dgm,dpm] = dmplot
Description
dmplot brings up a plot that
illustrates the disk gain margin (dgm) and disk phase
margin (dpm) for a sample system. Both margins are
derived from the largest disk that
Contains the critical point (–1,0)
Does not intersect the Nyquist plot of the open-loop response L
diskgm is the radius of this disk and a lower bound on the
classical gain margin.
dmplot(diskgm) plots the maximum
allowable phase variation as a function of the actual gain variation for a
given disk gain margin diskgm (the maximum gain variation
being diskgm). The closed-loop system is guaranteed to
remain stable for all combined gain/phase variations inside the plotted
ellipse.
[dgm,dpm] = dmplot returns the data
used to plot the gain/phase variation ellipse.
Examples
Disk Gain and Phase Margins
When you call dmplot
without an argument, the resulting plot and text shows a
comparison of a disk margin analysis with the classical
notations of gain and phase margins. The Nyquist plot is of
the loop transfer function L(s):
dmplot
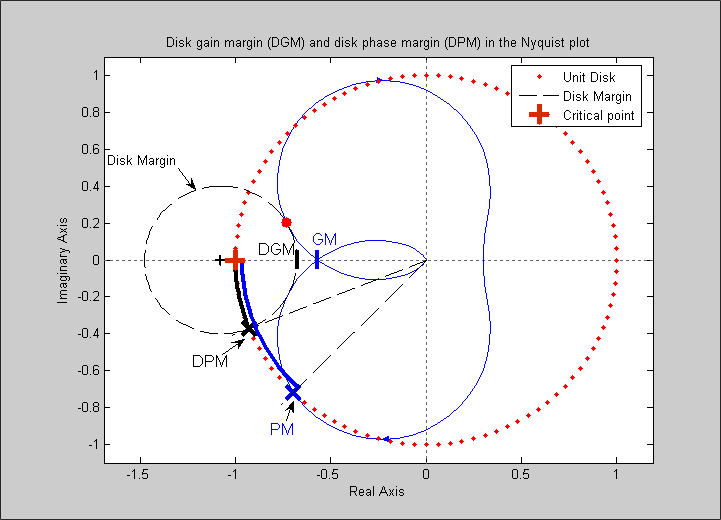
This figure shows a comparison of a disk margin analysis
with the classical notations of gain and phase margins.
The Nyquist plot is of the loop transfer function
L = 4(s/30 + 1)/((s+1)*(s^2 + 1.6s + 16))
- The Nyquist plot of L corresponds to the blue line
- The unit disk corresponds to the dotted red line
- GM and PM indicate the location of the classical gain
and phase margins for the system L.
- DGM and DPM correspond to the disk gain and phase
margins. The disk margins provide a lower bound on
classical gain and phase margins.
- The disk margin circle corresponds to the dashed black
line. The disk margin corresponds to the largest disk
centered at (GMD + 1/GMD)/2 that just touches the
loop transfer function L. This location is indicated
by the red dot.
The x-axis corresponds to the
gain variation in dB and the
y-axis corresponds to the
allowable phase variation in degrees. For a disk
gain margin corresponding to 3 dB (1.414), the
closed-loop system is stable for all phase and gain
variations inside the blue ellipse. For example, the
closed-loop system can simultaneously tolerate +/– 2
dB gain variation and +/– 14 deg phase variations.
To see the allowable variations for a given disk
gain margin, use the given value as an input to
dmplot.
figure % new figure window
dmplot(1.414)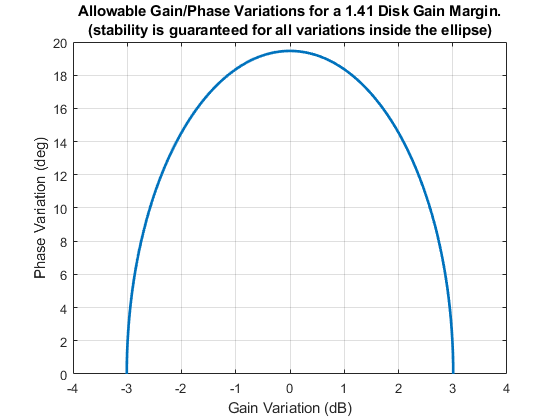
References
Barrett, M.F., Conservatism with robustness tests for linear feedback control systems, Ph.D. Thesis. Control Science and Dynamical Systems, University of Minnesota, 1980.
Blight, J.D., R.L. Dailey, and Gangsass, D., “Practical control law design for aircraft using multivariable techniques,” International Journal of Control, Vol. 59, No. 1, 1994, 93-137.
Bates, D., and I. Postlethwaite, Robust Multivariable Control of Aerospace Systems, Delft University Press, Delft, The Netherlands, ISBN: 90-407-2317-6, 2002.
Version History
Introduced before R2006aSee Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)